Ubuntu 24.04 安装 ROS 2 Jazzy 完整指南
分类:

什么是 ROS 2?
ROS 2(Robot Operating System 2)是 ROS 的下一代版本,是一个开源的机器人操作系统框架。ROS 2 专为现代机器人应用设计,提供了分布式计算、实时性能、多平台支持和更好的安全性等特性。
ROS 2 的主要特点
- 分布式架构:支持多机器人和多计算机之间的通信
- 实时性能:提供实时通信和调度能力
- 跨平台支持:支持 Linux、Windows 和 macOS
- 多种编程语言:支持 C++、Python、Java 等
- 模块化设计:通过节点(Node)和话题(Topic)实现松耦合的通信
- 丰富的工具链:提供命令行工具、可视化工具(rqt)和调试工具
ROS 2 Jazzy 是 ROS 2 的一个长期支持(LTS)版本,支持 Ubuntu Noble 24.04 的 amd64 和 arm64 架构。在网络通畅的情况下,安装较为顺利,未发现明显问题。
1. 系统环境准备
1.1 设置 Locale
设置系统 locale 为 UTF-8 编码,确保 ROS 2 正常运行:
# 检查当前 locale
locale
# 如果不是 UTF-8,先安装 locales
sudo apt update && sudo apt install locales
# 生成 en_US.UTF-8 locale
sudo locale-gen en_US en_US.UTF-8
# 更新系统 locale
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
# 设置当前会话的 locale
export LANG=en_US.UTF-8
# 再次检查 locale 确认设置成功
locale
1.2 添加 ROS 2 APT 源
确保启用 Ubuntu Universe 仓库,并添加 ROS 2 的 APT 源:
# 安装软件属性管理工具
sudo apt install software-properties-common
# 启用 Universe 仓库
sudo add-apt-repository universe
# 安装 curl(如果尚未安装)
sudo apt update && sudo apt install curl -y
# 获取最新版本的 ROS APT 源包
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F\" '{print $4}')
# 下载 ROS 2 APT 源 deb 包
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo ${UBUNTU_CODENAME:-${VERSION_CODENAME}})_all.deb"
# 安装 APT 源包
sudo dpkg -i /tmp/ros2-apt-source.deb
1.3 安装开发工具
# 更新包列表并安装 ROS 开发工具
sudo apt update && sudo apt install ros-dev-tools
2. 安装 ROS 2
2.1 安装 ROS 2 Desktop
# 更新系统包
sudo apt update
sudo apt upgrade
# 安装 ROS 2 Jazzy Desktop(包含可视化工具)
sudo apt install ros-jazzy-desktop
2.2 设置环境变量
# 临时设置当前会话的环境变量
source /opt/ros/jazzy/setup.bash
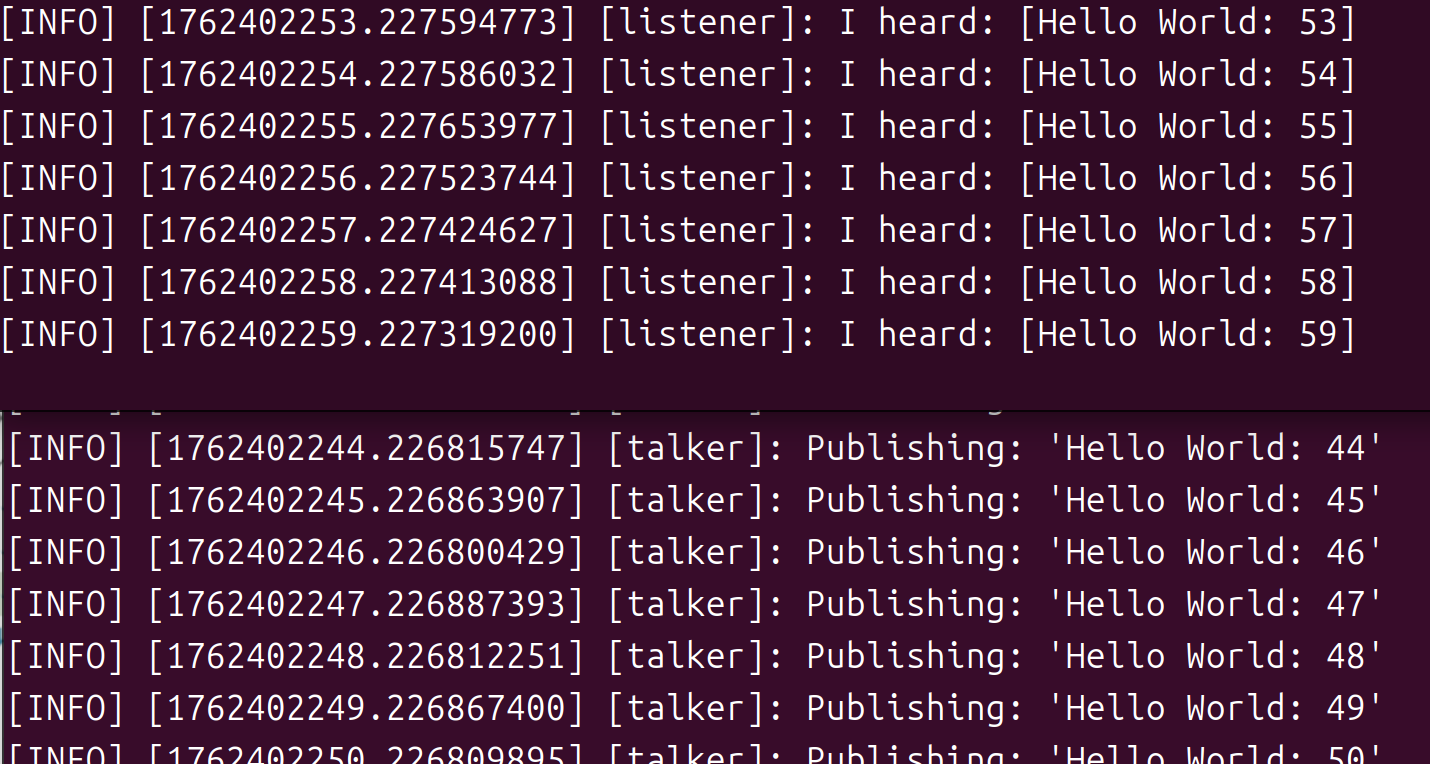
3. 测试 FastDDS 通信
FastDDS 是 ROS 2 的默认通信中间件。通过以下步骤测试安装是否成功:
- 在第一个终端中启动 talker 节点:
ros2 run demo_nodes_cpp talker
- 在第二个终端中启动 listener 节点:
# 先设置环境变量
source /opt/ros/jazzy/setup.bash
# 运行 listener
ros2 run demo_nodes_py listener
如果两个终端都能正常打印消息,说明安装成功:
4. 配置 Shell 启动脚本
ROS 2 的 shell 工作区概念允许在同一台电脑上同时安装多个不同版本的 ROS,通过启动脚本来切换版本。如果不加载安装文件,您将无法访问 ROS 2 命令,也无法查找或使用 ROS 2 软件包。
4.1 添加到 ~/.bashrc
# 编辑 ~/.bashrc 文件(使用您喜欢的编辑器,如 nano、vim 或 subl)
nano ~/.bashrc
# 或者使用 Sublime Text
subl ~/.bashrc
在文件末尾添加以下内容:
source /opt/ros/jazzy/setup.bash
4.2 使配置生效
# 重新加载配置
source ~/.bashrc
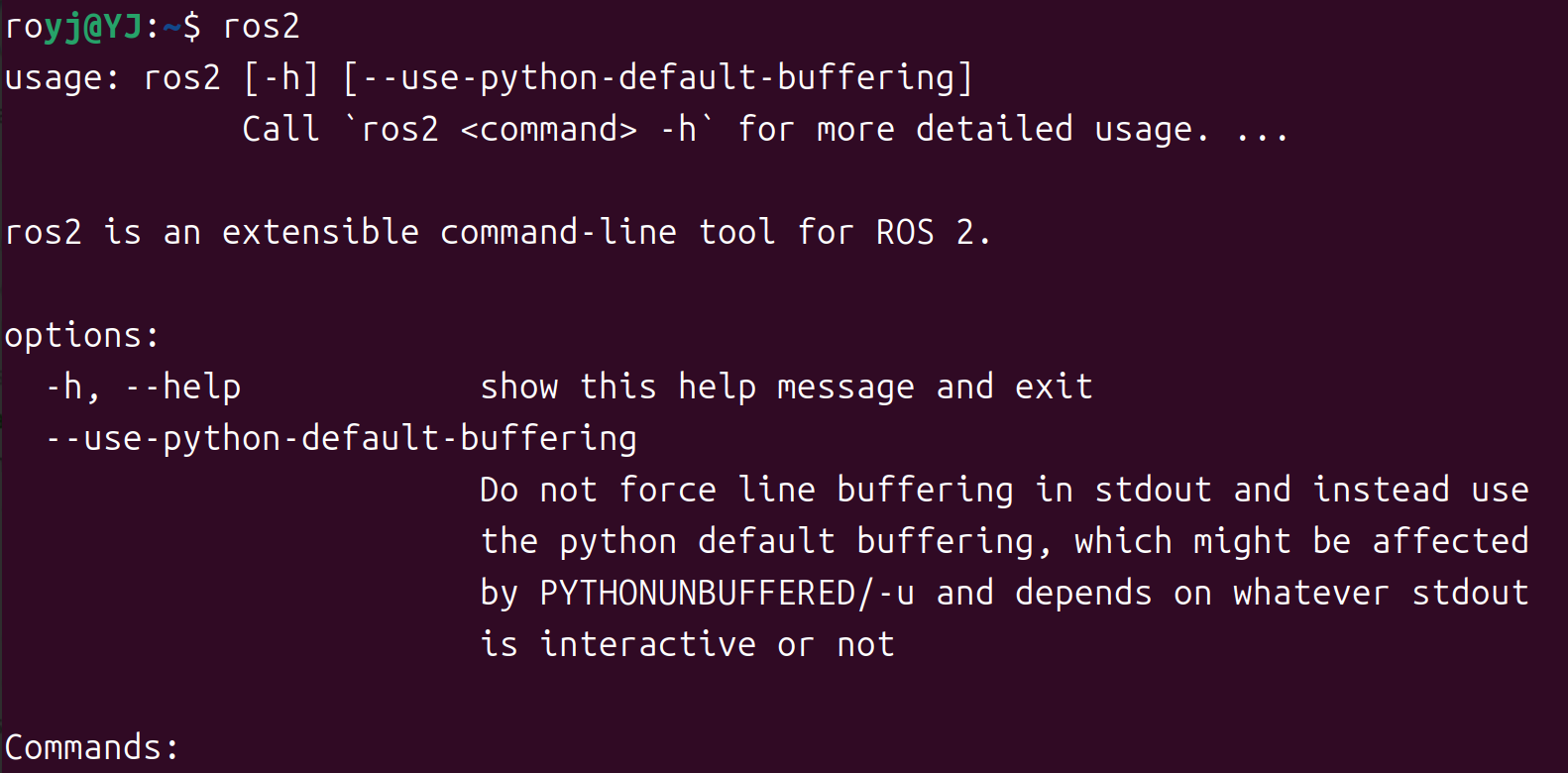
4.3 验证配置
打开一个新的命令行窗口,直接输入 ros2,如果显示如下内容,说明配置成功:
5. 使用 Turtlesim
Turtlesim 是一个轻量级的 ROS 2 学习模拟器。它以最基本的层面演示了 ROS 2 的功能,让您了解以后使用真实机器人或机器人模拟器时会遇到的问题。
5.1 安装 Turtlesim
sudo apt update
sudo apt install ros-jazzy-turtlesim
5.2 验证安装
ros2 pkg executables turtlesim
如果显示以下内容,说明安装成功:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
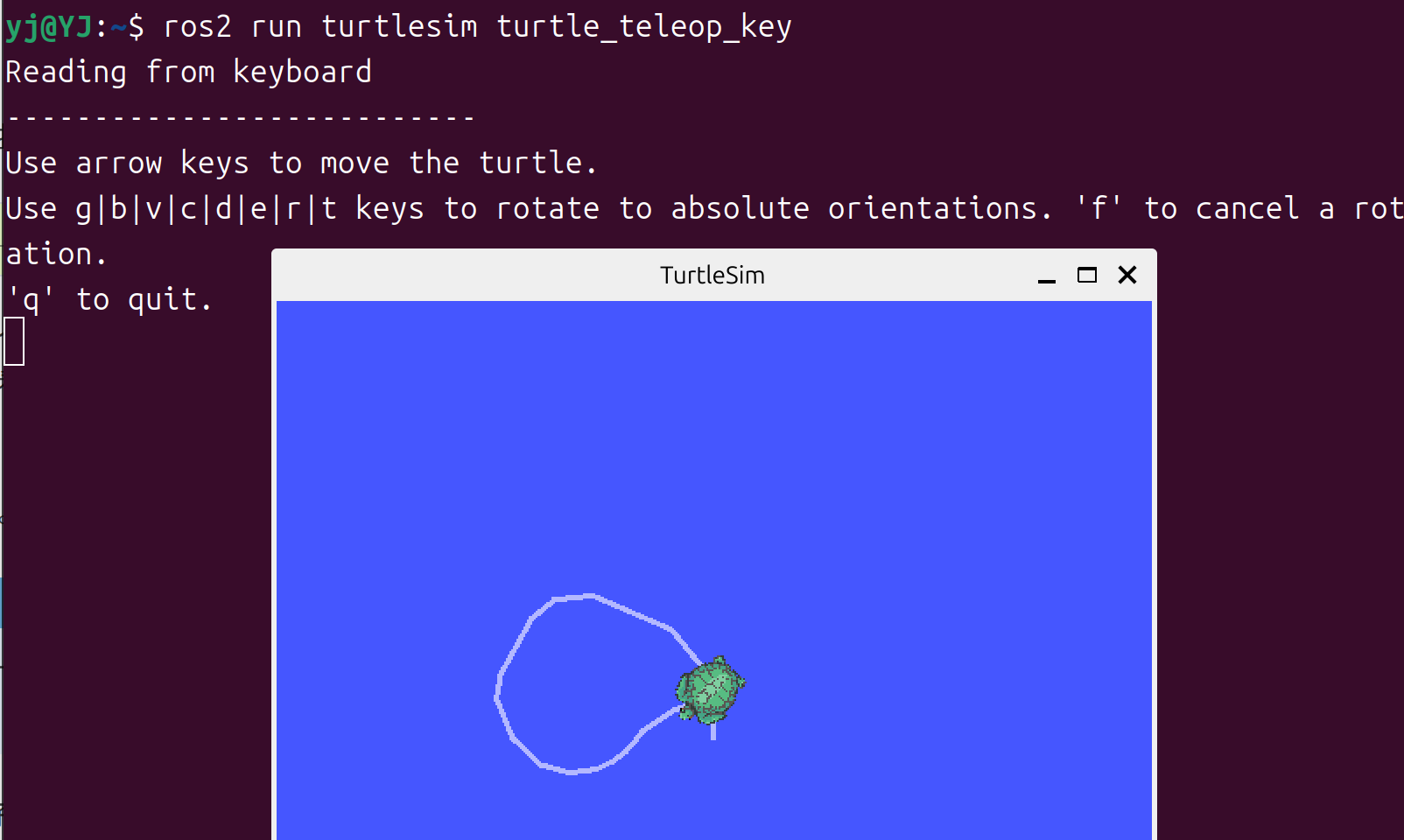
5.3 运行 Turtlesim
- 启动 Turtlesim 节点:
ros2 run turtlesim turtlesim_node
- 在另一个终端中启动键盘控制节点:
ros2 run turtlesim turtle_teleop_key
保持 turtle_teleop_key 的窗口处于激活状态,通过方向键可以控制乌龟移动。此时乌龟指代的是无人机的移动和控制方式。
6. 安装和使用 rqt
rqt 是 ROS 2 的图形用户界面 (GUI) 工具。rqt 中的所有操作都可以在命令行中完成,但 rqt 提供了一种更友好的方式来操作 ROS 2 元素。
6.1 安装 rqt
sudo apt update
sudo apt install '~nros-jazzy-rqt*'
6.2 运行 rqt
rqt
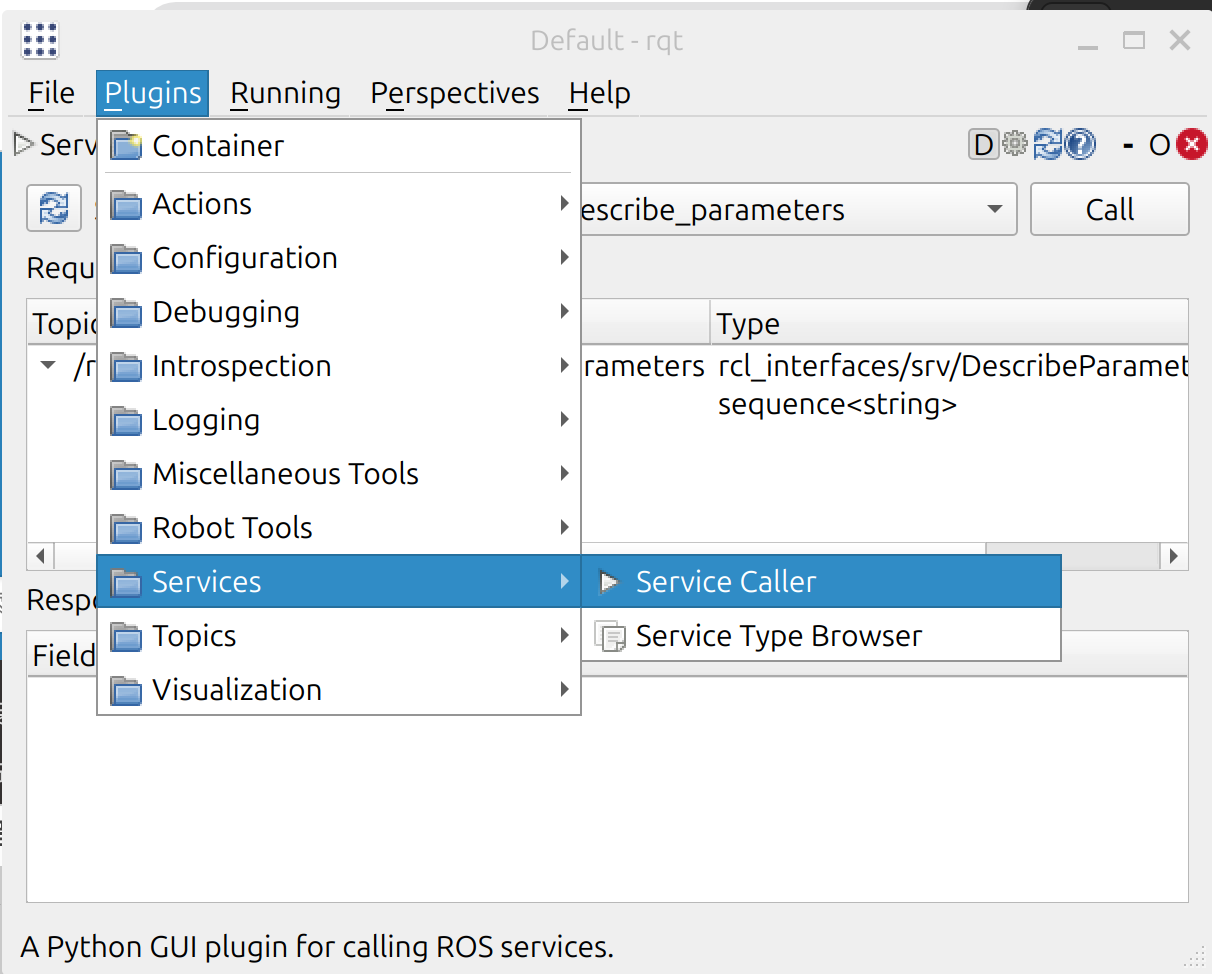
6.3 使用 rqt 调用服务
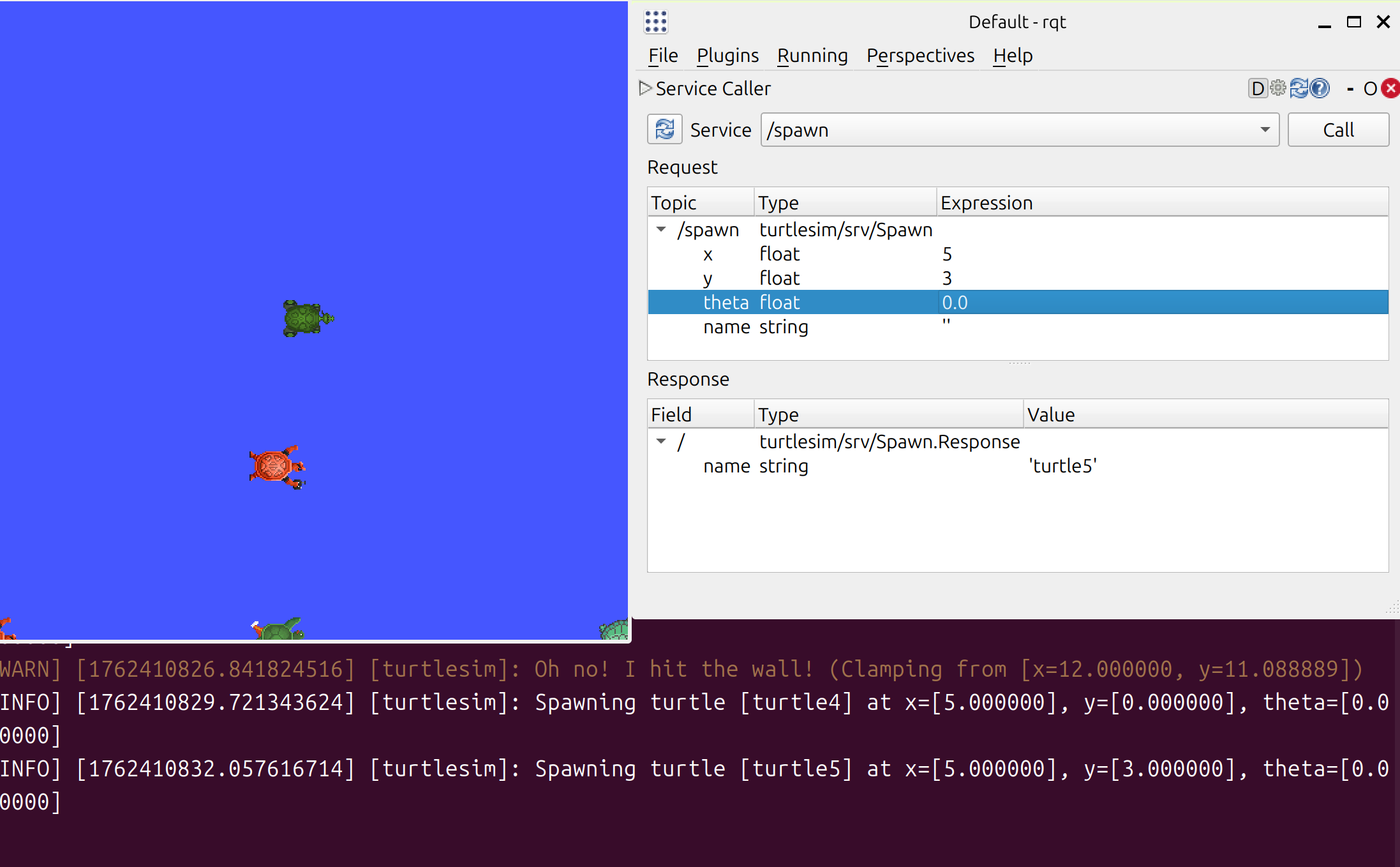
在 Turtlesim 运行时,可以通过 rqt 调用服务:
- 从下拉菜单选择 Plugins → Services → Service Caller
- 选择服务
/spawn - 在此处可以直接调整生成位置(x、y 坐标)、实例名称等参数
- 点击 Call 按钮
如果服务调用成功,您应该会看到一只新的海龟(同样是随机设计的)在您输入的 x 和 y 坐标处生成。
6.4 控制新创建的海龟实例
如果要控制新创建的实例 turtle2,可以在新的终端中执行:
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel
然后在这个终端控制即可。
如果您刷新 rqt 中的服务列表,您还会看到除了 /turtle1/... 之外,现在还有与新海龟相关的服务 /turtle2/...。
参考文档
请我喝杯咖啡
如果本文对你有帮助,欢迎打赏支持作者。

