基于 VRPN 的 PX4 EKF2 视觉融合基础调试指南
分类:
本文档不包含 ROS 2, MAVROS, Gazebo 等工具的基础使用方法,也没有如何安装、编译或运行这些软件的具体步骤;
而是专注于:VRPN 位姿数据是如何进入系统、在各个设备中如何被处理与融合、以及如何通过日志和脚本分析这些数据。
- 阅读本文档默认你已经具备以下基础能力:
- 能够在自己的环境中安装并使用
ROS 2,MAVROS和Gazebo - 能够启动
PX4飞控,QGroundControl,并、完成连接 - 能够运行简单的 Python 脚本和
ROS/ROS 2节点命令
1. 飞控的数据融合流程:从 VRPN 到位置融合数据
1.1 完整数据流
VRPN 动捕系统的位置和姿态数据经过多个环节处理,最终融合到飞控的位置估计中。整个系统涉及三个主要设备:动捕系统,伴随计算机 和 飞控。
graph TD
subgraph 动捕系统["动捕系统设备"]
A[VRPN动捕系统<br/>位置和姿态测量]
end
subgraph 伴随计算机["伴随计算机"]
B[VRPN转发脚本<br/>get_pose.py<br/>数据预处理和过滤]
C[MAVROS<br/>ROS与PX4通信桥梁]
end
subgraph 飞控["飞控设备"]
E[IMU传感器<br/>加速度计/陀螺仪]
D[PX4 EKF2融合器<br/>多传感器融合]
F[PX4位置控制器<br/>位置控制算法]
end
A -->|1. /vrpn_mocap/drone1/pose<br/>PoseStamped原始数据| B
B -->|2. 数据有效性检查<br/>位置跳变过滤| C
C -->|3. /mavros/vision_pose/pose<br/>转换为MAVLink并发送给PX4| D
E -->|4. IMU原始数据| D
D -->|5. estimator_local_position<br/>融合后的位置估计| F
F -->|6. vehicle_local_position<br/>作为控制回路反馈| C
C -->|7. /mavros/local_position/pose<br/>提供给上层应用使用| G[外部应用<br/>MAVSDK/QGC等]
style 动捕系统 fill:#e8f5e9,stroke:#009900,stroke-width:3px
style 伴随计算机 fill:#fff4e1,stroke:#ff9900,stroke-width:3px
style 飞控 fill:#e1f5ff,stroke:#0066cc,stroke-width:3px
style D fill:#e1f5ff,stroke:#0066cc,stroke-width:3px
style C fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style B fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style G fill:#fce4ec,stroke:#cc0066,stroke-width:2px设备功能说明:
| 设备 | 运行的功能 | 说明 |
|---|---|---|
| 动捕系统 | VRPN动捕系统 | 提供高精度位置和姿态测量数据 |
| 伴随计算机 | VRPN转发脚本 | 数据预处理、有效性检查、位置跳变过滤 |
| 伴随计算机 | MAVROS | ROS话题与MAVLink消息转换,与飞控通信 |
| 飞控 | IMU传感器 | 提供加速度和角速度数据(硬件) |
| 飞控 | PX4 EKF2融合器 | 融合VRPN和IMU数据,输出位置估计 |
| 飞控 | PX4位置控制器 | 基于位置估计进行飞行控制 |
1.2 关键话题说明
| 话题名称 | 类型 | 说明 | 数据来源 |
|---|---|---|---|
/vrpn_mocap/drone1/pose | geometry_msgs/PoseStamped | VRPN原始数据 | VRPN动捕系统 |
/mavros/vision_pose/pose | geometry_msgs/PoseStamped | 转发给PX4的VRPN数据 | MAVROS |
/mavros/local_position/pose | geometry_msgs/PoseStamped | EKF2融合后的最终位置 | PX4 EKF2 |
1.3 视觉转发脚本
在伴随计算机上,需要一个“视觉转发脚本”get_pose.py,负责把动捕系统输出的位姿数据转换成飞控可以理解的形式,并转发给MAVROS。
可以简单理解为:MAVROS是 ROS ↔ PX4 的桥,而 get_pose.py 则是 VRPN ↔ MAVROS 的桥——负责在进入 MAVROS 之前,把视觉数据清洗、规范好。
其功能可以概括为:
- 订阅动捕系统的位姿话题(例如
/vrpn_mocap/drone1/pose,类型为geometry_msgs/PoseStamped)。 - 检查数据有效性:过滤掉包含 NaN、无穷大或严重不合法四元数的数据。
- 限制位置跳变:如果相邻两帧的位置差异超过阈值(如 0.5 m),认为数据异常并丢弃。
- 可选:限制数据超时,如果长时间收不到新数据,则暂停转发,避免向飞控提供过期数据。
- 转发到MAVROS:将清洗后的位姿发布到
/mavros/vision_pose/pose,并将frame_id统一设为map坐标系,供飞控 EKF2 使用。 - 可选:记录日志,将实际转发的数据写入日志文件,方便之后用 Python 分析。
下面是一个基于 rospy 的简化示例,展示 get_pose.py 的核心逻辑(省略异常处理和完整启动代码):
#!/usr/bin/env python3
import rospy
from geometry_msgs.msg import PoseStamped
import math
class VisionRelay(object):
def __init__(self):
# 最大允许位置跳变(米)
self.max_position_change = rospy.get_param("~max_position_change", 0.5)
self.last_pose = None
# 订阅 VRPN 动捕位姿
self.sub = rospy.Subscriber(
"/vrpn_mocap/drone1/pose",
PoseStamped,
self.pose_callback,
queue_size=10,
)
# 发布到 MAVROS,供飞控 EKF2 使用
self.pub = rospy.Publisher(
"/mavros/vision_pose/pose",
PoseStamped,
queue_size=10,
)
def _is_pose_valid(self, pose):
"""检查位置和四元数是否有效"""
p = pose.position
q = pose.orientation
# 1)检查 NaN / Inf
for v in (p.x, p.y, p.z, q.x, q.y, q.z, q.w):
if math.isnan(v) or math.isinf(v):
return False
# 2)检查四元数近似归一化
q_norm = math.sqrt(q.x**2 + q.y**2 + q.z**2 + q.w**2)
if abs(q_norm - 1.0) > 0.1:
return False
return True
def _position_jump_too_large(self, new_pose):
"""检查与上一帧相比是否位置跳变过大"""
if self.last_pose is None:
return False
p1 = self.last_pose.pose.position
p2 = new_pose.pose.position
dx = p2.x - p1.x
dy = p2.y - p1.y
dz = p2.z - p1.z
dist = math.sqrt(dx * dx + dy * dy + dz * dz)
return dist > self.max_position_change
def pose_callback(self, msg):
"""接收 VRPN 位姿并进行过滤,再转发到 MAVROS"""
if not self._is_pose_valid(msg.pose):
# 丢弃无效数据
return
if self._position_jump_too_large(msg):
# 丢弃位置跳变过大的数据
return
# 通过检查,更新 last_pose
self.last_pose = msg
# 转发到 MAVROS,这里主动将 frame_id 规范到 \"map\" 坐标系
# 这样可以避免动捕系统原始 frame_id (如 \"world\" / 机体名等) 与 PX4/MAVROS 期望的全局坐标系不一致,
# 方便在下游(EKF2、本地位置话题、可视化工具)中进行统一的坐标变换和调试。
out = PoseStamped()
out.header.stamp = msg.header.stamp
out.header.frame_id = "map"
out.pose = msg.pose
self.pub.publish(out)
if __name__ == "__main__":
rospy.init_node("vision_relay")
node = VisionRelay()
rospy.spin()
无论使用 ROS1(rospy)还是 ROS2(rclpy),关键点都是:订阅 VRPN 位姿 → 进行数据过滤 → 以 /mavros/vision_pose/pose 的形式转发给 MAVROS,从而让飞控的 EKF2 接收到可靠的视觉位姿输入。
1.4 PX4 参数配置:使用视觉+IMU 进行EKF2融合
要让飞控真正使用视觉位置和高度,需要在 PX4 中正确配置 EKF2 相关参数,使其融合 External Vision(EV)和自身 IMU,并在需要时停用 GPS 融合。下面给出一个典型的配置思路(以 QGroundControl 参数界面为例):
启用视觉位置融合(EKF2_AID_MASK)
- 在 QGC 中搜索参数
EKF2_AID_MASK。 - 确保勾选/包含:
- Vision position(视觉位置)
- (可选)Vision yaw(视觉航向),如果动捕系统提供可靠的 yaw。
- 如果不希望使用 GPS:取消 GPS position、GPS yaw 等相关选项,或者直接在飞控硬件上不接 GPS。
- 在 QGC 中搜索参数
选择高度来源(EKF2_HGT_MODE / EKF2_EV_CTRL)
- 将
EKF2_HGT_MODE设置为 Vision / External Vision(具体名称取决于 PX4 版本)。 - 在
EKF2_EV_CTRL中启用高度相关融合选项(position + height)。
- 将
合理设置视觉噪声参数(EKF2_EV_POS_X / EKF2_EV_POS_Y 等)
- 在日志分析中,如果发现视觉数据经常被拒绝(test_ratio 很大),说明噪声参数过小或门限过严。
- 通常可以将:
EKF2_EV_POS_X/EKF2_EV_POS_Y从 0.1 调整到 0.3–0.5。EKF2_EVP_NOISE调整到与 EV_POS_X/Y 相近的数值。EKF2_EVP_GATE调整到 5–7 之间,允许合理的残差。
只保留需要的传感器融合
- 确保
EKF2_AID_MASK中只启用你实际在用的传感器(IMU 必须,视觉按需,GPS 可停用)。 - 这样可以避免 EKF2 在 GPS 和视觉之间来回切换,导致位置跳变。
- 确保
保存参数并重启飞控
- 修改完参数后,在 QGC 中保存参数并重启飞控,让新的融合配置生效。
完成以上配置后,EKF2 应当可以以 IMU 为高频预测源,以视觉位姿为慢速绝对参考,在无 GPS 的环境中完成稳定的位置和高度融合。
1.5 EKF2融合过程
EKF2(Extended Kalman Filter 2)是PX4的核心融合算法,将VRPN数据与IMU数据融合:
graph LR
A[VRPN位置数据] -->|External Vision| C[EKF2融合器]
B[IMU数据] -->|高频预测| C
C -->|融合算法| D[位置估计]
D -->|输出| E[local_position/pose]
style C fill:#e1f5ff,stroke:#0066cc,stroke-width:3px
style E fill:#fce4ec,stroke:#cc0066,stroke-width:2px融合步骤:
- IMU预测阶段:使用IMU数据(加速度计、陀螺仪)以高频(~200Hz)预测位置和姿态
- VRPN更新阶段:接收VRPN数据,计算innovation(预测值与测量值的差)
- 数据有效性检查:计算test_ratio,如果超过阈值则拒绝数据
- 状态更新:融合有效数据,更新位置和姿态估计
1.6 验证融合
检查 /mavros/local_position/pose 话题输出:
# 检查话题是否存在
rostopic list | grep local_position
# 检查话题频率(应该>10Hz)
rostopic hz /mavros/local_position/pose
# 查看话题内容
rostopic echo /mavros/local_position/pose
正常输出示例:
header:
seq: 12345
stamp:
secs: 1234567890
nsecs: 123456789
frame_id: "map"
pose:
position:
x: 1.234
y: 2.345
z: -0.567
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
如果话题有正常输出且频率>10Hz,说明VRPN数据已成功融合到飞控位置信息中。
只要你使用 MAVROS 并持续发布:
rostopic echo /mavros/vision_pose/pose
MAVROS 会自动将其转换为 MAVLink 的 VISION_POSITION_ESTIMATE,在 EKF2 参数配置正确(例如 EKF2_AID_MASK 中启用 Vision 相关选项)的前提下,EKF2 就会融合这些视觉数据,并通过 /mavros/local_position/pose 话题输出。
2. 融合结果验证与快速排查
2.1 使用 MAVROS 话题快速确认 EKF2 输出
当怀疑 EKF2 没有正确融合 VRPN 视觉数据时,可以先用 MAVROS 话题做一个“最小自检”:
# 直接查看局部位置输出
rostopic echo /mavros/local_position/pose
# 检查话题频率(建议 >10Hz)
rostopic hz /mavros/local_position/pose
# 查看话题信息,确认发布者与消息类型
rostopic info /mavros/local_position/pose
如果 /mavros/local_position/pose 话题不存在、频率明显偏低,或者数据长时间不更新,说明 EKF2 融合过程存在问题,需要进一步检查 PX4 内部状态和日志。
如果 /mavros/vision_pose/pose 话题不存在,说明 get_pose.py 脚本运行存在问题,需要进一步检查和调试。
2.2 检查 PX4 EKF2 状态与常见失败原因
PX4 内部通过 uORB 话题提供 EKF2 的详细状态与告警信息,可以直接在 ROS2 环境下查看:
# 查看 EKF2 的时间戳信息(是否在正常更新)
ros2 topic echo /fmu/out/ekf2_timestamps
# 查看 EKF2 估计器状态(融合标志、test_ratio 等)
ros2 topic echo /fmu/out/estimator_status
在 estimator_status 中,重点关注以下几个方面:
- Innovation Test Ratios:各传感器的残差检验值,如果长期明显大于 1,说明该传感器数据经常被拒绝,可能存在噪声模型或数据质量问题。
- Control Status / Fusion Flags:哪些传感器被真正纳入融合(如 GPS、视觉位置、气压高度等),可用来确认视觉融合是否已实际启用。
- 告警与错误信息:PX4 会通过状态位和日志给出融合失败的直接原因。
常见 EKF2 融合失败原因包括:
- GPS 信号丢失或不稳定(但参数中仍启用 GPS 融合,导致状态在 GPS/视觉间频繁切换)。
- IMU 数据异常(震动过大、传感器损坏或安装不当)。
- 磁力计干扰或偏差过大(航向不可靠,影响位置估计)。
- 参数配置错误(例如
EKF2_AID_MASK未启用 Vision Position,或高度来源与实际数据来源不一致)。
2.3 结合日志与 Flight Review 做进一步确认
如果通过话题和 uORB 状态仍无法快速判断问题根因,可以进一步查看 PX4 记录的 .ulg 日志:
- 使用 QGroundControl 下载
.ulg日志文件(参考后文“4.1 QGroundControl日志下载”)。 - 使用 QGroundControl 自带的日志浏览器或 Flight Review 网站打开日志。
- 在日志中重点查看
Estimator Status / EKF2相关曲线:- Innovation Test Ratios:确认视觉位置、气压高度、IMU 等传感器的残差是否在合理范围。
- Control Status / Fusion Flags:确认 External Vision 是否真正被纳入融合,而不是一直处于“待用”或“拒绝”状态。
- Warning / Error 信息:例如
GPS quality insufficient,Mag fusion failed,Bad IMU data等。
通过“话题自检 + uORB 状态 + 日志回放”这一套组合排查,可以较快定位是传感器数据本身的问题(如动捕数据不稳定、IMU 噪声过大)、参数配置错误,还是EKF2 内部对某类数据一直处于拒绝状态。
3. 可视化验证:Gazebo中的位置监控
3.1 系统架构
使用Gazebo仿真环境和ROS2 bridge,可以实时可视化飞机的位置和姿态,对比实机位置数据与仿真显示:
graph TD
A[实机飞控] -->|MAVLink| B[MAVROS]
B -->|/mavros/local_position/pose| C[ROS2 Bridge]
C -->|ROS2话题| D[Gazebo插件]
D -->|可视化| E[Gazebo场景]
F[VRPN数据] -->|/vrpn_mocap/drone1/pose| G[转发脚本]
G -->|/mavros/vision_pose/pose| B
style E fill:#fce4ec,stroke:#cc0066,stroke-width:2px
style C fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style B fill:#e1f5ff,stroke:#0066cc,stroke-width:2px3.3 Gazebo可视化插件
创建Gazebo插件订阅飞机位置话题,在Gazebo场景中显示飞机模型:
<!-- Gazebo模型文件示例 -->
<model name="drone1">
<pose>0 0 0 0 0 0</pose>
<static>false</static>
<plugin name="pose_visualizer" filename="libpose_visualizer.so">
<ros2_topic>/mavros/local_position/pose</ros2_topic>
<update_rate>50</update_rate>
</plugin>
</model>
3.4 位置数据对比
在Gazebo中可以同时显示:
- 实机位置:来自
/mavros/local_position/pose(EKF2融合后的位置) - VRPN原始位置:来自
/vrpn_mocap/drone1/pose(动捕系统原始数据) - 期望位置:来自位置控制器setpoint
graph LR
A[实机位置<br/>mavros/local_position/pose] -->|对比| D[Gazebo显示]
B[VRPN原始位置<br/>vrpn_mocap/drone1/pose] -->|对比| D
C[期望位置<br/>setpoint] -->|对比| D
style D fill:#fce4ec,stroke:#cc0066,stroke-width:3px观察要点:
- 位置差异:实机位置与VRPN原始位置的差异反映了EKF2融合的效果
- 姿态差异:如果姿态显示不一致,可能是EKF2融合或IMU数据问题
- 延迟:观察数据更新的延迟,如果延迟过大可能影响控制性能
- 跳变:如果位置突然跳变,可能是数据过滤失效或EKF2融合异常
4. 异常诊断:使用 pyulog 库分析飞控日志
4.1 QGroundControl日志下载
当发现位置异常或融合问题时,需要下载飞行日志进行分析。
4.1.1 连接飞控
- 打开QGroundControl(QGC)
- 通过USB或无线连接飞控
- 等待连接建立(状态栏显示"Connected")
4.1.2 下载日志文件
graph TD
A[QGC连接飞控] -->|连接成功| B[Vehicle Setup]
B -->|Log Files| C[查看日志列表]
C -->|选择日志| D[下载.ulg文件]
D -->|保存到本地| E[日志文件]
style E fill:#e8f5e9,stroke:#009900,stroke-width:2px操作步骤:
- 在QGC主界面,点击左上角菜单 → Vehicle Setup
- 选择 Log Files 标签页
- 查看日志列表,选择需要分析的日志(通常是最新的)
- 点击 Download 按钮下载
- 日志文件保存为
.ulg格式
日志文件命名:
- 格式:
log_XXX_YYYY-MM-DD-HH-MM-SS.ulg - 例如:
log_287_2025-11-25-05-30-36.ulg
4.2 Python脚本分析工具
使用Python脚本解析.ulg文件,提取关键数据并生成可视化图表。
4.2.1 安装依赖
# 安装pyulog库(用于解析.ulg文件)
pip install pyulog
# 安装其他依赖
pip install numpy matplotlib pandas
4.2.2 基础分析脚本
下面是一个简单的分析脚本示例:
从 .ulg 日志中读取 EKF 内部估计位置(estimator_local_position)和融合后对外发布的位置(vehicle_local_position)。
在一张图上绘制二者的 X/Y/Z 三轴曲线对比图并保存为PNG文件,同时在终端打印保存信息。
from pyulog import ULog
import matplotlib.pyplot as plt
# 这里直接指定需要分析的 ulog 文件
ulog_file = 'log_284_2025-11-25-01-15-04.ulg'
# 从文件名中提取「ulog 编号」(例如 log_0_2025-... -> log_0)
base_name = ulog_file.split('.')[0]
ulog_id = '_'.join(base_name.split('_')[:2])
output_png = f'{ulog_id}.png'
# 读取日志
ulog = ULog(ulog_file)
# 获取 EKF 估计位置
try:
elp = ulog.get_dataset('estimator_local_position0')
except Exception:
elp = ulog.get_dataset('estimator_local_position')
# 获取 vehicle_local_position
vlp = ulog.get_dataset('vehicle_local_position')
# 时间戳(秒)
t_el = elp.data['timestamp'] / 1e6
t_vl = vlp.data['timestamp'] / 1e6
# 位置数据
x_el = elp.data['x']
y_el = elp.data['y']
z_el = elp.data['z']
x_vl = vlp.data['x']
y_vl = vlp.data['y']
z_vl = vlp.data['z']
# 只做 XYZ 对比并输出图片
fig, axes = plt.subplots(3, 1, figsize=(12, 10), sharex=True)
# X
ax = axes[0]
ax.plot(t_el, x_el, label='estimator_local_position.x', alpha=0.7)
ax.plot(t_vl, x_vl, label='vehicle_local_position.x', alpha=0.7)
ax.set_ylabel('X (m)')
ax.legend()
ax.grid(True, alpha=0.3)
# Y
ax = axes[1]
ax.plot(t_el, y_el, label='estimator_local_position.y', alpha=0.7)
ax.plot(t_vl, y_vl, label='vehicle_local_position.y', alpha=0.7)
ax.set_ylabel('Y (m)')
ax.legend()
ax.grid(True, alpha=0.3)
# Z
ax = axes[2]
ax.plot(t_el, z_el, label='estimator_local_position.z', alpha=0.7)
ax.plot(t_vl, z_vl, label='vehicle_local_position.z', alpha=0.7)
ax.set_ylabel('Z (m)')
ax.set_xlabel('Time (s)')
ax.legend()
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig(output_png, dpi=150)
print(f'图表已保存为 {output_png}')
plt.show()
4.3 执行分析
graph TD
A[飞行测试 / 采集数据] -->|QGC下载| B[.ulg 日志文件]
B -->|Python基础分析脚本<br/>main.py| C[提取关键数据]
C -->|生成图表| D[位置 / 高度时间序列图]
C -->|生成图表| E[EV融合状态 / test_ratio 图]
D -->|对比| F[定位异常时间与位置跳变]
E -->|对比| F
F -->|在 Gazebo 中对比| G[实机 / VRPN / 期望轨迹可视化]
G -->|综合判断| H[确定问题原因]
H -->|调整参数 / 修改脚本| I[EKF2参数 / VRPN转发脚本 / 控制逻辑]
I -->|重新起飞并采集新日志| A
style A fill:#e8f5e9,stroke:#009900,stroke-width:2px
style B fill:#e8f5e9,stroke:#009900,stroke-width:2px
style C fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style D fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style E fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style F fill:#fff4e1,stroke:#ff9900,stroke-width:2px
style G fill:#e1f5ff,stroke:#0066cc,stroke-width:2px
style H fill:#fce4ec,stroke:#cc0066,stroke-width:2px
style I fill:#fce4ec,stroke:#cc0066,stroke-width:2px在图示流程中,当通过日志分析、Gazebo 可视化完成参数调整或问题修复后,应当重新回到流程起点(从新一轮飞行测试与日志采集开始),形成闭环迭代的调试过程。
4.4 分析调试过程案例
本节展示的是同一套系统在同一场景下的三轮重复测试与分析过程:每次起飞都记录 .ulg 日志,用前文的 Python 脚本生成三轴位置对比图,逐步调整参数与脚本,直到 estimator_local_position 与 vehicle_local_position 的 X/Y/Z 曲线基本重合。
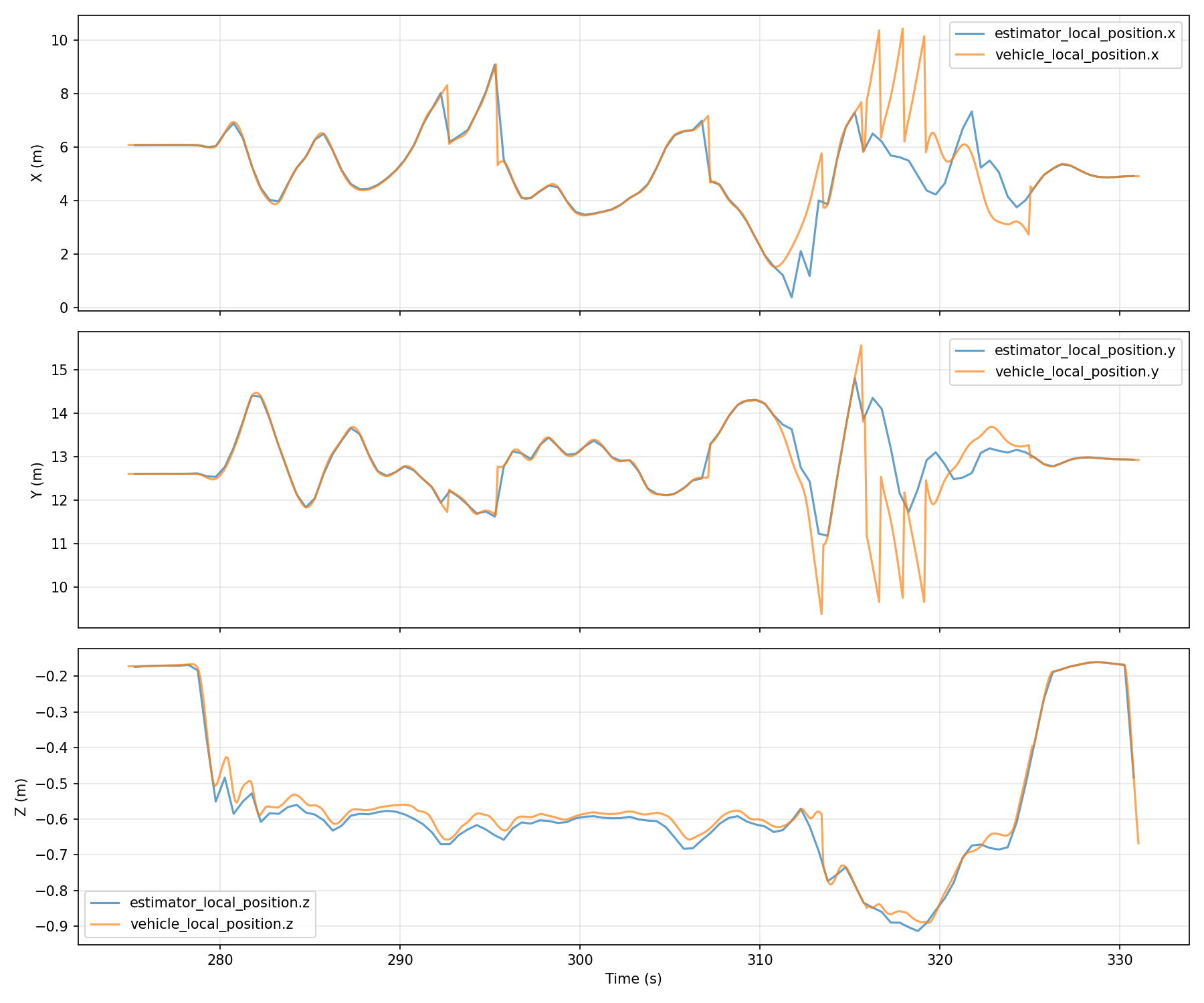
第一次测试:log_284——初步评估
log_284 是该案例中的第一次测试飞行,通过 Python 分析脚本生成的三轴位置对比图如下:
你可以下载对应的原始 .ulg 日志文件以便自行复现分析过程:
在 log_284 中可以看到:在切换到 Position 模式之前,estimator_local_position 与 vehicle_local_position 的三轴曲线基本重合,XYZ 一致性良好,说明 EKF2 内部状态与对外发布的位置估计在非 Position 模式下工作正常。
当通过 QGC 将飞控切换到 Position 模式后,图中的 X/Y 轴曲线开始出现明显的锯齿状位置跳变,飞控开始拒绝超范围的位置输入,平面位置估计在相邻采样之间快速来回抖动,最终导致控制回路输出剧烈变化,飞机进入失控状态。
问题原因分析:
Position 模式下的控制回路反馈振荡:在
Position模式下,位置控制器会读取vehicle_local_position作为反馈信号,计算位置误差并生成控制指令。当位置估计不稳定时,会形成反馈循环:EKF2 内部估计(estimator_local_position)出现波动 → 位置控制器基于不稳定的位置反馈产生控制指令 → 控制指令导致飞机实际运动,进一步影响位置估计 → 形成振荡反馈,导致锯齿状跳变。这解释了为什么问题只在切换到Position模式后才暴露出来。EKF2 数据拒绝机制导致的间歇性跳变:EKF2 的 innovation test 会计算预测值与测量值的残差(innovation),如果
test_ratio超过门限(如EKF2_EVP_GATE),会拒绝该次视觉数据。视觉数据被拒绝时,EKF2 只能依赖 IMU 进行预测,位置逐渐漂移;下次视觉数据被接受时,位置突然"跳回"到正确值。这种"拒绝-接受"的切换导致位置曲线出现锯齿状跳变。在log_284中,由于视觉噪声参数(EKF2_EV_POS_X/Y)设置过小,视觉数据频繁被拒绝,导致锯齿状跳变非常明显。两个位置数据源的不同处理逻辑:
estimator_local_position是 EKF2 内部状态,相对平滑但可能有延迟;vehicle_local_position是经过位置控制器和范围限制处理后的对外发布值。当 EKF2 内部估计与控制器期望不一致时,vehicle_local_position可能被限制或修正,导致两者出现偏差。在log_284中,两个曲线"打架"的情况正是这种处理逻辑差异的体现。
这一轮测试为后续调试建立了清晰的"问题基线"——问题只在 Position 模式下暴露,且主要集中在平面位置 X/Y 的估计质量上。
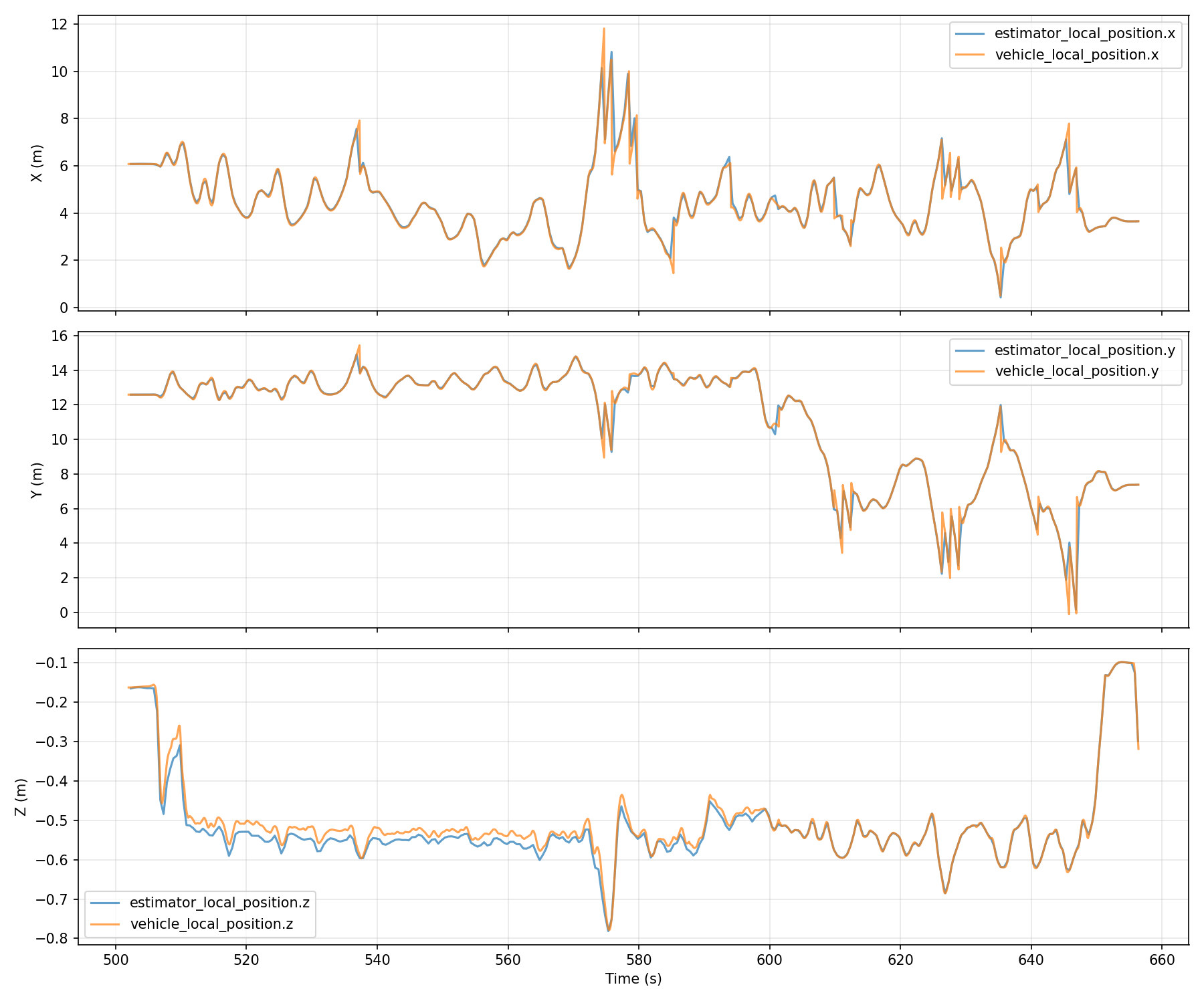
第二次测试:log_286——参数调整
在第二次测试 log_286 中,在飞行前对 EKF2_EV_POS_X,EKF2_EV_POS_Y 等视觉噪声参数以及相关 innovation gate(EKF2_EVP_GATE)进行了调整,希望减少视觉数据被拒绝的次数,并改善 EKF2 对外发布的位置输出质量:
对应的原始日志文件为:
对比 log_284 与 log_286 的分析图可以看到:在切换到 Position 模式时,X/Y 轴上虽然依然存在大量锯齿状跳变,但 estimator_local_position 与 vehicle_local_position 在两个平面轴上的轨迹已经基本重合,不再出现前一轮测试中那种明显彼此"打架"的情况。
改进原因分析:
通过调整 EKF2_EV_POS_X/Y 和 innovation gate(EKF2_EVP_GATE),减少了视觉数据被 EKF2 拒绝的频率。在 log_284 中,由于视觉噪声参数设置过小,EKF2 的 innovation test 频繁拒绝视觉数据,导致位置在"IMU 预测漂移"和"视觉数据跳回"之间快速切换,形成锯齿状跳变。参数调整后,虽然仍有跳变(说明问题尚未完全解决),但两个位置曲线已经基本重合,说明视觉数据被拒绝的频率显著降低,EKF2 内部状态与对外发布的位置估计已经趋于一致。
这表明视觉测量与 EKF2 内部状态本身是一致的,问题更可能来自当前 PX4 固件版本或其他高级参数配置,而不是 VRPN 数据链路或噪声模型本身。
第三次测试:log_287——融合效果收敛
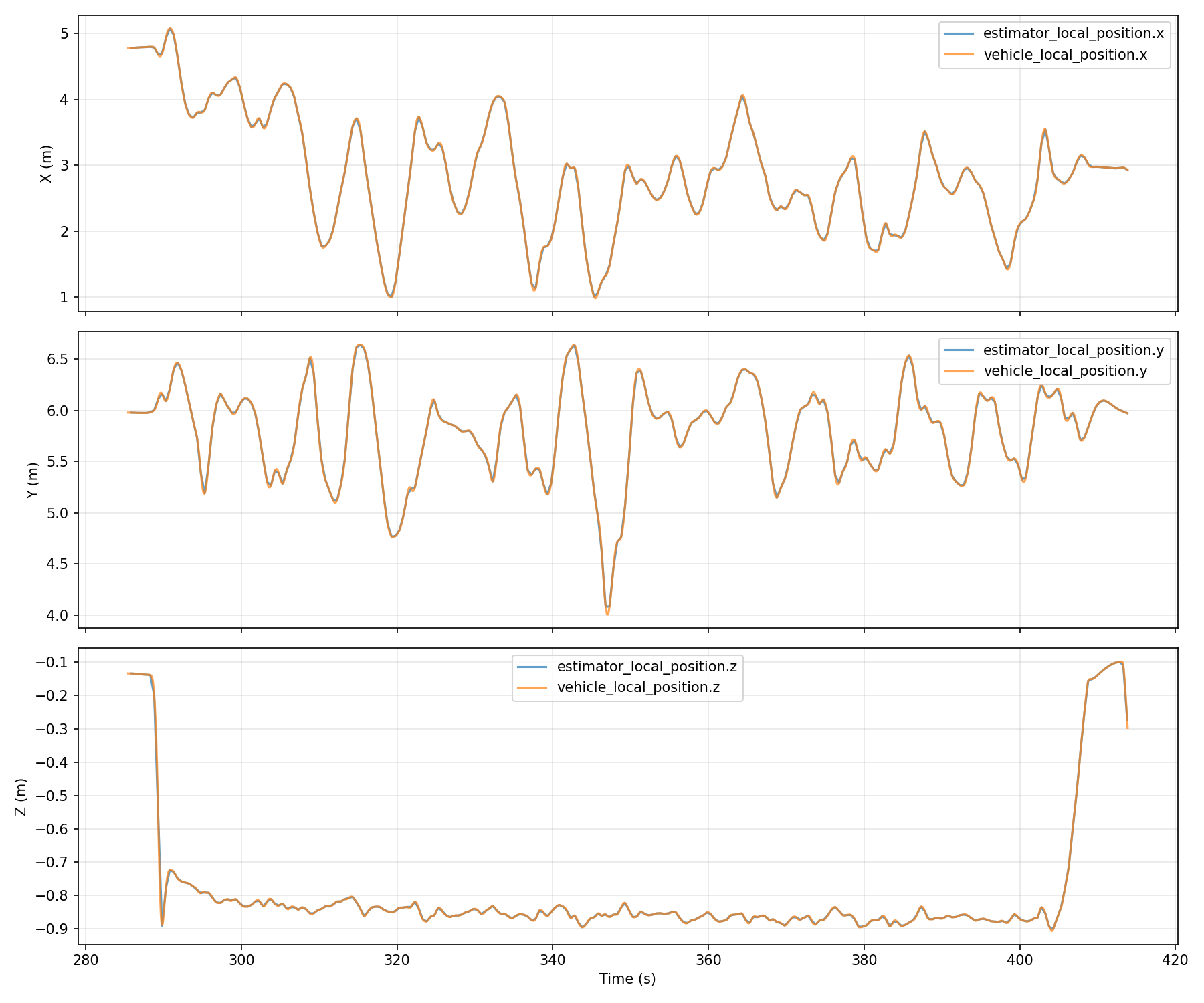
第三次测试 log_287 展示的是在前两次测试基础上,更换 PX4 固件版本、重新配置 EKF2 相关参数并完成电机与遥控器校准之后,系统运行较为稳定的一次飞行:
你可以下载该次飞行的日志文件进行进一步分析:
在这次飞行中,从姿态控制到切换到 Position 模式的整个过程中,XYZ 三轴的 estimator_local_position 与 vehicle_local_position 曲线始终平滑且高度重合,X/Y 轴不再出现锯齿状位置跳变,Position 模式下飞行轨迹稳定可控,高度曲线也未出现明显漂移或突变。
通过三次测试的逐步改进,验证了问题的根本原因和解决方案:
参数调整的作用(log_286):通过调整
EKF2_EV_POS_X/Y和 innovation gate(EKF2_EVP_GATE),减少了视觉数据被拒绝的频率,使两个位置曲线基本重合,证明了参数配置的重要性。固件升级与完整校准的协同效果(log_287):更换 PX4 固件版本、重新配置 EKF2 参数并完成传感器校准后,彻底消除了锯齿状跳变。这说明问题不仅来自参数配置,也可能与固件版本的位置处理逻辑有关。新固件版本可能修复了 Position 模式下的位置处理逻辑问题,或者优化了 EKF2 与位置控制器之间的接口,使得两个位置数据源能够更好地同步。
控制回路反馈振荡的消除:在
log_287中,由于位置估计稳定,Position 模式下的控制回路不再出现振荡反馈。位置控制器能够基于稳定的位置反馈产生平滑的控制指令,避免了锯齿状跳变。数据拒绝机制的优化:通过参数调整和固件升级,EKF2 的 innovation test 能够更准确地评估视觉数据的质量,减少了不必要的拒绝,使得位置估计更加连续和平滑。
结合 Gazebo 可视化,对比 /mavros/local_position/pose 与 /vrpn_mocap/drone1/pose 可以看到,VRPN 融合后的整体轨迹与动捕原始轨迹保持一致。
通过这一个案例的三次测试与分析,可以将"日志采集 → Python 分析 → 参数/脚本调整 → 重新飞行验证"的闭环流程具体化,直到最终实现三轴位置曲线的高度重合,方便在后续调试中快速套用同样的方法。
参考文档
- PX4 User Guide - External Vision
- PX4 User Guide - EKF2 Tuning Guide
- MAVROS 官方文档
- ROS 1 rostopic 命令参考
- ROS 2 CLI 工具参考
- Gazebo 官方文档
- VRPN - Virtual-Reality Peripheral Network
- Flight Review 日志分析网站
- pyulog GitHub 仓库
请我喝杯咖啡
如果本文对你有帮助,欢迎打赏支持作者。

