使用 pyulog 分析 PX4 飞控日志
分类:
本文档以实际案例 log_284_2025-11-25-01-15-04.ulg 为例,系统介绍如何使用 Python 的 pyulog 库分析 PX4 飞控生成的 ULog 格式日志文件,通过提取关键数据并生成可视化图表来诊断飞行过程中的潜在问题。
本案例展示了系统性的日志分析流程:从数据探索(识别关键主题)→ 数据提取与预处理 → 理解数据意义 → 可视化分析(生成专业图表)→ 问题诊断(建立因果链条)→ 解决方案(问题排查清单)。这种方法具有系统性、可复现性和实用性,适用于各种飞行日志分析场景,能够帮助开发者快速定位和解决飞行过程中的问题,提升飞行器的安全性和性能。
你可以从以下链接下载该日志文件进行实践:
1. 从 ULog 中提取有效的数据条目
ULog 是 PX4 飞控系统采用的二进制日志格式,记录了飞行过程中的传感器数据、系统状态、控制指令等丰富信息。要解析 ULog 文件,需要使用 pyulog 库。
1.1 安装 pyulog
首先,确保已安装 Python 环境(推荐 Python 3.7+),然后使用 pip 安装 pyulog:
pip install pyulog
同时,为了进行数据分析和可视化,还需要安装以下依赖:
pip install numpy matplotlib pandas
1.2 读取 ULog 文件
使用 pyulog 读取 ULog 文件的基本方法:
from pyulog import ULog
# 读取 ULog 文件(使用实际案例日志)
ulog = ULog('log_284_2025-11-25-01-15-04.ulg')
# 获取所有消息名称(uORB 主题)
message_names = ulog.get_message_names()
print(f"日志中包含的消息类型: {message_names}")
1.3 解析日志
在实际分析中,我们首先需要了解日志中包含哪些主题,然后根据分析目标识别关键主题。以下脚本可以帮助我们系统地探索日志内容:
from pyulog import ULog
import sys
# 读取日志文件
ulog_file = 'log_284_2025-11-25-01-15-04.ulg'
ulog = ULog(ulog_file)
# 获取所有消息名称
message_names = [dataset.name for dataset in ulog.data_list]
print(f"日志文件: {ulog_file}")
print(f"总共包含 {len(message_names)} 个主题\n")
print("=" * 80)
print("所有主题列表:")
print("=" * 80)
# 按类别分类主题
categories = {
'飞行状态': ['vehicle_status', 'commander_state', 'vehicle_control_mode'],
'姿态控制': ['vehicle_attitude', 'vehicle_attitude_setpoint', 'vehicle_rates_setpoint'],
'位置导航': ['vehicle_local_position', 'vehicle_global_position', 'vehicle_gps_position'],
'EKF2 融合': ['estimator_local_position', 'estimator_status', 'estimator_innovations'],
'传感器数据': ['sensor_combined', 'sensor_accel', 'sensor_gyro', 'sensor_mag'],
'电机/舵机': ['actuator_outputs', 'actuator_controls'],
'外部定位': ['vehicle_vision_position', 'vehicle_odometry'],
'其他': []
}
# 分类显示
for category, keywords in categories.items():
matched = []
for name in sorted(message_names):
if any(keyword in name for keyword in keywords):
matched.append(name)
elif category == '其他' and not any(name in m for m in categories.values() if m != categories['其他']):
if name not in [item for sublist in [v for k, v in categories.items() if k != '其他'] for item in sublist]:
matched.append(name)
if matched:
print(f"\n【{category}】")
for name in matched:
try:
dataset = ulog.get_dataset(name)
field_count = len(dataset.data.keys())
sample_count = len(list(dataset.data.values())[0]) if dataset.data else 0
print(f" - {name:40s} (字段数: {field_count:3d}, 样本数: {sample_count:6d})")
except:
print(f" - {name:40s} (无法读取)")
运行后返回
日志文件: log_284_2025-11-25-01-15-04.ulg
总共包含 97 个主题
================================================================================
所有主题列表:
================================================================================
【飞行状态】
- vehicle_control_mode (字段数: 16, 样本数: 114)
- vehicle_status (字段数: 39, 样本数: 114)
【姿态控制】
- vehicle_attitude (字段数: 11, 样本数: 1124)
- vehicle_attitude_setpoint (字段数: 11, 样本数: 1124)
- vehicle_rates_setpoint (字段数: 8, 样本数: 2807)
【位置导航】
- vehicle_local_position (字段数: 55, 样本数: 563)
- vehicle_local_position_setpoint (字段数: 15, 样本数: 563)
【EKF2 融合】
- estimator_innovations (字段数: 33, 样本数: 112)
- estimator_innovations (字段数: 33, 样本数: 112)
- estimator_local_position (字段数: 55, 样本数: 112)
- estimator_local_position (字段数: 55, 样本数: 112)
- estimator_status (字段数: 40, 样本数: 282)
- estimator_status (字段数: 40, 样本数: 282)
- estimator_status_flags (字段数: 71, 样本数: 72)
- estimator_status_flags (字段数: 71, 样本数: 72)
【传感器数据】
- sensor_accel (字段数: 12, 样本数: 56)
- sensor_accel (字段数: 12, 样本数: 56)
- sensor_combined (字段数: 14, 样本数: 11528)
- sensor_gyro (字段数: 12, 样本数: 56)
- sensor_gyro (字段数: 12, 样本数: 56)
- sensor_mag (字段数: 8, 样本数: 56)
【电机/舵机】
- actuator_outputs (字段数: 18, 样本数: 1)
- actuator_outputs (字段数: 18, 样本数: 1)
- actuator_outputs (字段数: 18, 样本数: 1)
【其他】
- action_request (字段数: 4, 样本数: 5)
- actuator_armed (字段数: 8, 样本数: 114)
- actuator_motors (字段数: 15, 样本数: 563)
- battery_status (字段数: 52, 样本数: 282)
- can_interface_status (字段数: 5, 样本数: 551)
- can_interface_status (字段数: 5, 样本数: 551)
- config_overrides (字段数: 6, 样本数: 115)
- control_allocator_status (字段数: 26, 样本数: 282)
- cpuload (字段数: 3, 样本数: 113)
- distance_sensor_mode_change_request (字段数: 2, 样本数: 1)
- estimator_aid_src_ev_hgt (字段数: 14, 样本数: 112)
- estimator_aid_src_ev_hgt (字段数: 14, 样本数: 112)
- estimator_aid_src_ev_pos (字段数: 21, 样本数: 112)
- estimator_aid_src_ev_pos (字段数: 21, 样本数: 112)
- estimator_aid_src_ev_yaw (字段数: 14, 样本数: 112)
- estimator_aid_src_ev_yaw (字段数: 14, 样本数: 112)
- estimator_aid_src_gravity (字段数: 28, 样本数: 112)
- estimator_aid_src_gravity (字段数: 28, 样本数: 112)
- estimator_aid_src_mag (字段数: 28, 样本数: 112)
- estimator_aid_src_mag (字段数: 28, 样本数: 112)
- estimator_attitude (字段数: 11, 样本数: 112)
- estimator_attitude (字段数: 11, 样本数: 112)
- estimator_event_flags (字段数: 20, 样本数: 60)
- estimator_event_flags (字段数: 20, 样本数: 60)
- estimator_innovation_test_ratios (字段数: 33, 样本数: 112)
- estimator_innovation_test_ratios (字段数: 33, 样本数: 112)
- estimator_innovation_variances (字段数: 33, 样本数: 112)
- estimator_innovation_variances (字段数: 33, 样本数: 112)
- estimator_odometry (字段数: 28, 样本数: 112)
- estimator_odometry (字段数: 28, 样本数: 112)
- estimator_selector_status (字段数: 46, 样本数: 589)
- estimator_sensor_bias (字段数: 32, 样本数: 56)
- estimator_sensor_bias (字段数: 32, 样本数: 56)
- estimator_states (字段数: 52, 样本数: 112)
- estimator_states (字段数: 52, 样本数: 112)
- estimator_status_flags (字段数: 71, 样本数: 72)
- estimator_status_flags (字段数: 71, 样本数: 72)
- event (字段数: 29, 样本数: 25)
- failsafe_flags (字段数: 40, 样本数: 104)
- failure_detector_status (字段数: 11, 样本数: 114)
- home_position (字段数: 13, 样本数: 3)
- input_rc (字段数: 30, 样本数: 112)
- magnetometer_bias_estimate (字段数: 21, 样本数: 3)
- manual_control_setpoint (字段数: 17, 样本数: 282)
- manual_control_switches (字段数: 15, 样本数: 58)
- navigator_status (字段数: 3, 样本数: 114)
- parameter_update (字段数: 9, 样本数: 2)
- position_setpoint_triplet (字段数: 70, 样本数: 1)
- px4io_status (字段数: 77, 样本数: 57)
- rate_ctrl_status (字段数: 5, 样本数: 282)
- rtl_status (字段数: 6, 样本数: 28)
- rtl_time_estimate (字段数: 4, 样本数: 28)
- sensor_baro (字段数: 6, 样本数: 56)
- sensor_selection (字段数: 3, 样本数: 4)
- sensors_status_imu (字段数: 35, 样本数: 282)
- system_power (字段数: 17, 样本数: 112)
- takeoff_status (字段数: 3, 样本数: 11)
- telemetry_status (字段数: 38, 样本数: 56)
- timesync_status (字段数: 6, 样本数: 56)
- trajectory_setpoint (字段数: 15, 样本数: 282)
- transponder_report (字段数: 40, 样本数: 1)
- vehicle_acceleration (字段数: 5, 样本数: 1124)
- vehicle_air_data (字段数: 9, 样本数: 282)
- vehicle_angular_velocity (字段数: 8, 样本数: 2807)
- vehicle_command (字段数: 15, 样本数: 3)
- vehicle_command_ack (字段数: 8, 样本数: 4)
- vehicle_constraints (字段数: 4, 样本数: 56)
- vehicle_imu (字段数: 16, 样本数: 112)
- vehicle_imu (字段数: 16, 样本数: 112)
- vehicle_imu_status (字段数: 32, 样本数: 56)
- vehicle_imu_status (字段数: 32, 样本数: 56)
- vehicle_land_detected (字段数: 13, 样本数: 62)
- vehicle_local_position_setpoint (字段数: 15, 样本数: 563)
- vehicle_magnetometer (字段数: 7, 样本数: 112)
- vehicle_thrust_setpoint (字段数: 5, 样本数: 2807)
- vehicle_torque_setpoint (字段数: 5, 样本数: 2807)
我们可以清楚地看到日志中包含的所有主题,并根据分析目标选择关键主题。对于 log_284 这个案例,在此文档中我们特别关注:
- 飞行模式:
vehicle_status- 了解何时切换到 Position 模式 - EKF2 融合状态:
estimator_status- 检查融合器是否正常工作 - 位置估计:
estimator_local_position和vehicle_local_position- 对比分析位置跳变问题 - 姿态数据:
vehicle_attitude- 评估飞行器姿态稳定性
2. 关键数据条目
基于 log_284 案例中识别出的关键主题,本节详细讲解每个数据条目的物理意义、数据单位和提取方法。
2.1 飞行模式与系统状态
vehicle_status - 飞行器系统状态,包含飞行模式、安全状态等关键信息。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
nav_state | uint8 | - | 导航状态(飞行模式):0=MANUAL(手动), 1=ALTCTL(高度控制), 2=POSCTL(位置控制), 3=AUTO_MISSION(自动任务), 4=AUTO_LOITER(自动悬停), 5=AUTO_RTL(自动返航), 6=ACRO(特技), 7=OFFBOARD(外部控制) |
arming_state | uint8 | - | 解锁状态:0=未解锁, 1=已解锁 |
hil_state | uint8 | - | HIL 仿真状态 |
failsafe | bool | - | 故障保护是否激活 |
vehicle_status = ulog.get_dataset('vehicle_status')
timestamps = np.array(vehicle_status.data['timestamp']) / 1e6
nav_state = np.array(vehicle_status.data['nav_state'])
arming_state = np.array(vehicle_status.data['arming_state'])
# 查找模式切换时间点
mode_changes = np.where(np.diff(nav_state) != 0)[0]
for idx in mode_changes:
print(f"时间 {timestamps[idx]:.2f} s: 切换到模式 {nav_state[idx+1]}")
2.2 姿态控制数据
vehicle_attitude - 飞行器姿态信息,使用四元数表示。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
q[0] | float | - | 四元数 w 分量(标量部分) |
q[1] | float | - | 四元数 x 分量(对应横滚轴) |
q[2] | float | - | 四元数 y 分量(对应俯仰轴) |
q[3] | float | - | 四元数 z 分量(对应偏航轴) |
vehicle_attitude_setpoint - 姿态设定值,用于评估控制器跟踪性能。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
roll_body | float | 弧度 (rad) | 横滚角设定值 |
pitch_body | float | 弧度 (rad) | 俯仰角设定值 |
yaw_body | float | 弧度 (rad) | 偏航角设定值 |
thrust_body[0] | float | - | X 轴推力设定值(归一化) |
thrust_body[1] | float | - | Y 轴推力设定值(归一化) |
thrust_body[2] | float | - | Z 轴推力设定值(归一化) |
2.3 位置与导航数据
vehicle_local_position - 本地坐标系(NED)下的位置、速度和加速度信息,这是对外发布的位置估计。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
x | float | 米 (m) | X 轴位置(北向,NED 坐标系) |
y | float | 米 (m) | Y 轴位置(东向,NED 坐标系) |
z | float | 米 (m) | Z 轴位置(地向,NED 坐标系,向上为负) |
vx | float | 米/秒 (m/s) | X 轴速度 |
vy | float | 米/秒 (m/s) | Y 轴速度 |
vz | float | 米/秒 (m/s) | Z 轴速度 |
ax | float | 米/秒² (m/s²) | X 轴加速度 |
ay | float | 米/秒² (m/s²) | Y 轴加速度 |
az | float | 米/秒² (m/s²) | Z 轴加速度 |
xy_valid | bool | - | XY 平面位置是否有效 |
z_valid | bool | - | Z 轴位置是否有效 |
v_xy_valid | bool | - | XY 平面速度是否有效 |
v_z_valid | bool | - | Z 轴速度是否有效 |
estimator_local_position - EKF2 内部位置估计,用于分析融合算法性能。字段与 vehicle_local_position 相同,但这是 EKF2 的原始输出,未经过位置控制器的处理。
注意:在 log_284 案例中,对比这两个位置数据源可以发现 Position 模式下的位置跳变问题。
2.4 EKF2 融合状态数据
estimator_status - EKF2 融合器状态,包含融合质量指标和故障标志。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
gps_check_fail_flags | uint16 | - | GPS 检查失败标志位 |
filter_fault_flags | uint16 | - | 滤波器故障标志位 |
innovation_check_flags | uint16 | - | 残差检查标志位 |
solution_status_flags | uint16 | - | 解算状态标志位 |
pos_horiz_accuracy | float | 米 (m) | 水平位置精度估计 |
pos_vert_accuracy | float | 米 (m) | 垂直位置精度估计 |
vel_accuracy | float | 米/秒 (m/s) | 速度精度估计 |
estimator_innovations - EKF2 融合残差(innovation),用于诊断融合质量。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
ev_hvel[0] | float | 米/秒 (m/s) | 外部视觉水平速度残差 X |
ev_hvel[1] | float | 米/秒 (m/s) | 外部视觉水平速度残差 Y |
ev_hpos[0] | float | 米 (m) | 外部视觉水平位置残差 X |
ev_hpos[1] | float | 米 (m) | 外部视觉水平位置残差 Y |
ev_vpos | float | 米 (m) | 外部视觉垂直位置残差 |
ev_hvel_test_ratio[0] | float | - | 水平速度 X 测试比率(test_ratio) |
ev_hvel_test_ratio[1] | float | - | 水平速度 Y 测试比率 |
ev_hpos_test_ratio[0] | float | - | 水平位置 X 测试比率 |
ev_hpos_test_ratio[1] | float | - | 水平位置 Y 测试比率 |
test_ratio 说明:当 test_ratio > 1.0 时,EKF2 会拒绝该次测量数据。在 log_284 案例中,过小的 EKF2_EV_POS_X/Y 参数导致 test_ratio 频繁超过阈值,视觉数据被拒绝,造成位置跳变。
2.5 传感器数据
sensor_combined - 综合传感器数据,包含加速度计、陀螺仪和磁力计的融合读数。
| 字段名 | 类型 | 单位 | 说明 |
|---|---|---|---|
timestamp | uint64 | 微秒 (μs) | 时间戳 |
accelerometer_m_s2[0] | float | 米/秒² (m/s²) | X 轴加速度 |
accelerometer_m_s2[1] | float | 米/秒² (m/s²) | Y 轴加速度 |
accelerometer_m_s2[2] | float | 米/秒² (m/s²) | Z 轴加速度 |
gyro_rad[0] | float | 弧度/秒 (rad/s) | X 轴角速度 |
gyro_rad[1] | float | 弧度/秒 (rad/s) | Y 轴角速度 |
gyro_rad[2] | float | 弧度/秒 (rad/s) | Z 轴角速度 |
magnetometer_ga[0] | float | 高斯 (G) | X 轴磁力计读数 |
magnetometer_ga[1] | float | 高斯 (G) | Y 轴磁力计读数 |
magnetometer_ga[2] | float | 高斯 (G) | Z 轴磁力计读数 |
合理范围:
- 加速度计:±20 m/s²(正常飞行),±9.8 m/s²(静止时重力)
- 陀螺仪:±10 rad/s(正常飞行)
- 磁力计:±0.5 G(地球磁场强度)
3. 通过绘图分析关键数据
基于 log_284 案例,本节展示如何将提取的关键数据绘制成图表,直观展示数据变化趋势,为问题诊断提供可视化支持。
读者可以自行下载该日志文件,使用本文提供的脚本进行复现分析。
3.1 飞行模式时间线
通过飞行模式随时间变化的曲线,可以直接观测整段飞行中飞机经历的模式阶段(起飞、悬停、手动介入、稳高/定点、降落等),这是后续所有细节分析的时间框架。
脚本下载:plot_flight_mode.py
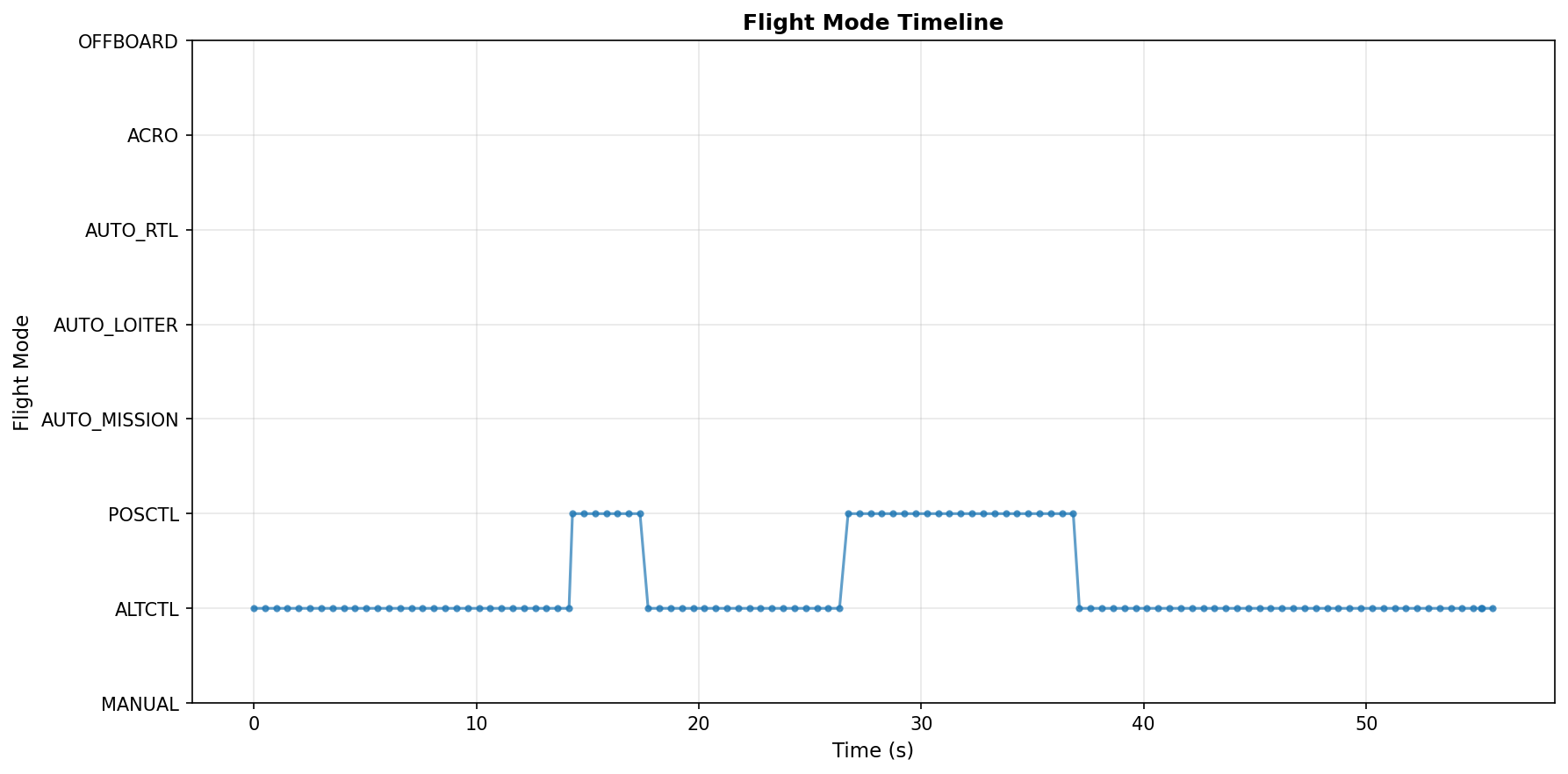
图表含义:
- 横轴:时间(秒),从日志开始后的相对时间,范围 0-55 秒。
- 纵轴:飞行模式(Flight Mode),显示 PX4 中的各个模式,包括 MANUAL, ALTCTL, POSCTL, AUTO_MISSION, AUTO_LOITER, AUTO_RTL, ACRO, OFFBOARD 等。
- 数据系列:蓝色线条和圆形标记表示当前激活的飞行模式,模式切换时线条发生垂直跳变。
- 关键信息:每一次模式切换的精确时间点、模式持续时长,以及模式切换的频率和模式。
分析:
- 数据观察:
- 飞行模式序列(0-55秒):
- 0-13.5秒:ALTCTL(高度控制)模式:飞行开始阶段,飞机处于高度控制模式,此阶段对水平位置估计的依赖较弱,主要依赖气压计和加速度计进行高度控制。
- 13.5-17.5秒:POSCTL(位置控制)模式:首次切换到位置控制模式,持续约4秒。这是第一个关键时间点,飞机开始依赖水平位置估计进行控制。
- 17.5-25.5秒:ALTCTL(高度控制)模式:切回高度控制模式,持续约8秒。可能由于位置控制出现问题,飞手或系统自动切回高度控制模式。
- 25.5-37.5秒:POSCTL(位置控制)模式:再次切换到位置控制模式,持续约12秒。这是第二个关键时间点,也是持续时间最长的位置控制阶段。
- 37.5-55秒:ALTCTL(高度控制)模式:最后切回高度控制模式,直到日志结束。
- 模式切换特征:
- 飞机仅在 ALTCTL 和 POSCTL 之间切换,没有进入其他模式(如 MANUAL, AUTO_MISSION, OFFBOARD 等),说明飞行过程相对简单。
- 在约55秒的飞行过程中,发生了4次模式切换(ALTCTL→POSCTL→ALTCTL→POSCTL→ALTCTL),频繁切换往往意味着飞手在尝试使用位置控制模式但遇到问题,或系统检测到异常自动触发保护逻辑。
- 两次 POSCTL 模式分别持续约4秒和12秒,持续时间较短,特别是第一次仅4秒,可能表明位置控制模式启动后很快出现问题。
- 飞行模式序列(0-55秒):
- 关键发现:
- 时间锚点与问题关联:
- 13.5秒(首次切入 POSCTL):这是第一个关键时间点,结合后续分析可以发现,此时开始出现水平位置漂移和姿态控制异常。
- 25.5秒(再次切入 POSCTL):这是第二个关键时间点,也是持续时间最长的位置控制阶段,可能对应最严重的异常阶段(如位置对比图中35-45秒的异常峰值期)。
- 模式切换与异常的关系:每次从 ALTCTL 切换到 POSCTL 后,飞机开始依赖水平位置估计,若位置估计本身存在问题(如 EKF2 对外发布位置跳变),就会导致位置控制异常,表现为水平位置漂移和姿态控制异常;切回 ALTCTL 后,对水平位置估计的依赖减弱,异常现象可能暂时缓解。
- 时间锚点与问题关联:
- 结论验证:
这一飞行模式时间线为后续所有细节分析提供了明确的时间框架。通过将姿态角异常、位置跳变、加速度计波动等数据与模式切换时间点对齐,可以清晰地建立模式切换 → 位置估计异常 → 控制失效的因果链条,为问题诊断提供关键的时间锚点。
- 数据观察:
3.2 姿态角时间序列
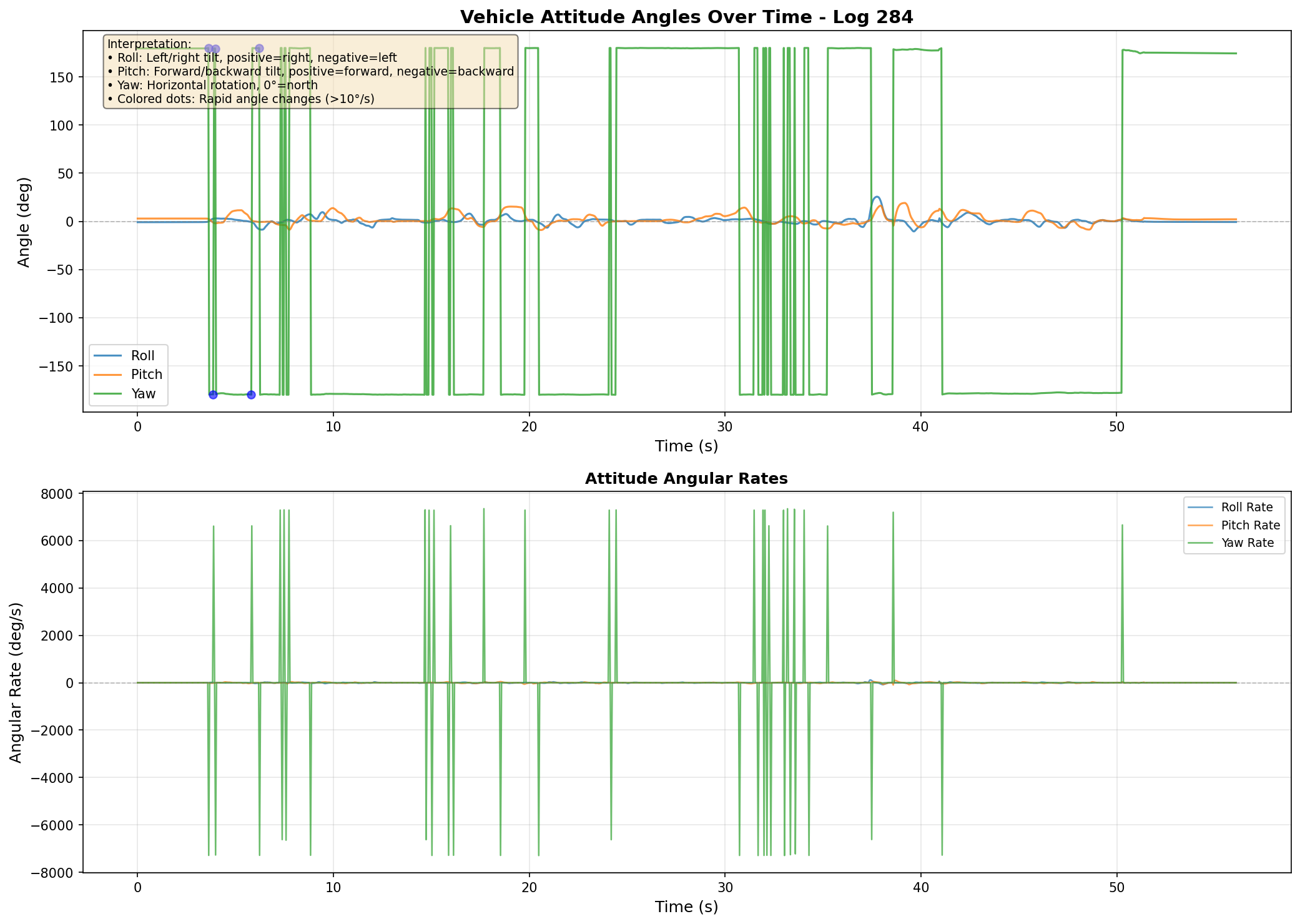
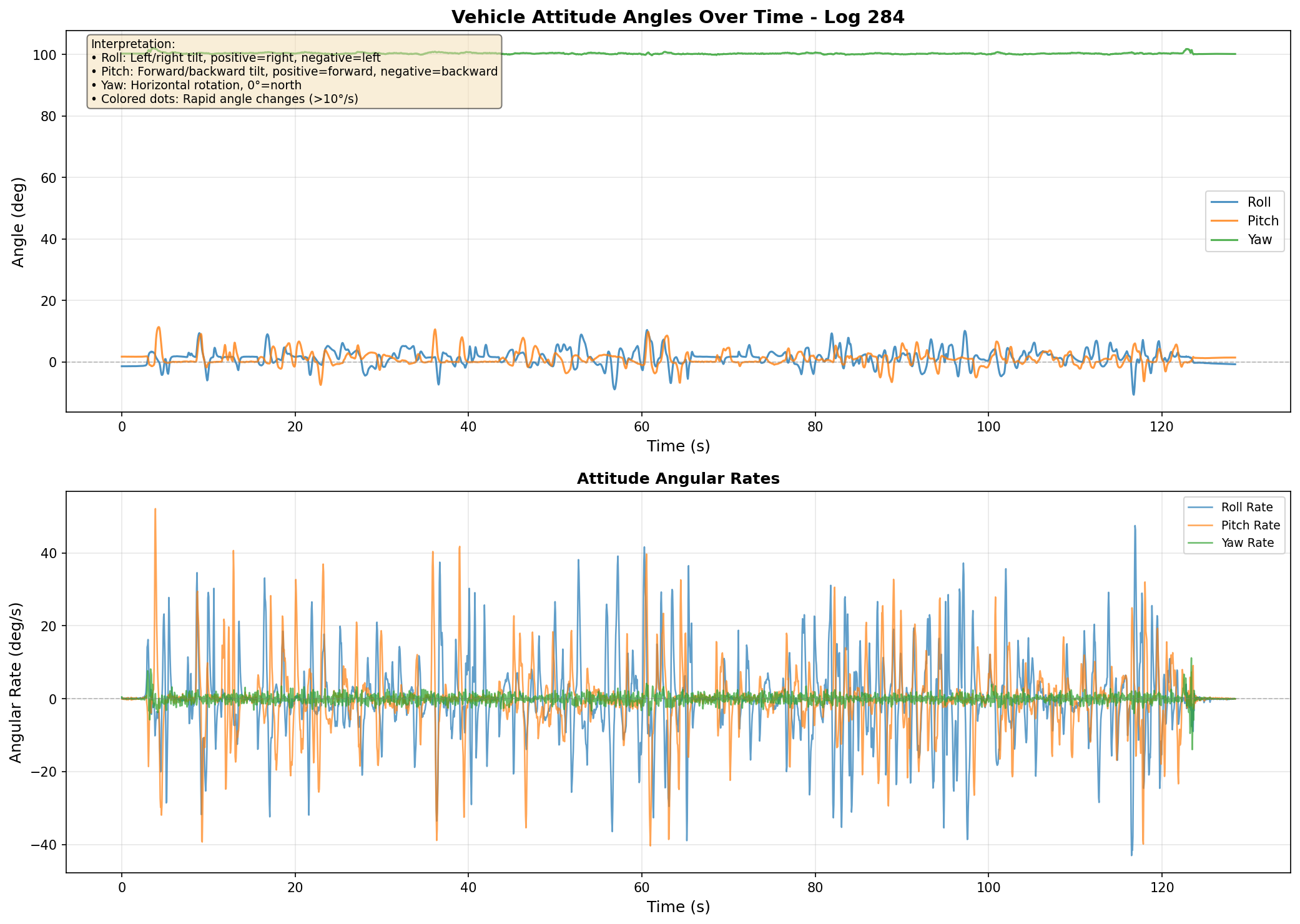
姿态角(Roll/Pitch/Yaw)时间序列是最直观反映飞控控制性能的图表之一。通过对比问题飞行(log_284)和正常飞行(log_287),可以很快判断控制回路是否处于健康工作区间。
脚本下载:plot_attitude.py
问题飞行
正常飞行
图表含义:
- 横轴:时间(秒),从日志开始后的相对时间。
- 纵轴:
- 姿态角图:角度(度),显示 Roll(横滚角,绕 X 轴,蓝色)、Pitch(俯仰角,绕 Y 轴,橙色)、Yaw(偏航角,绕 Z 轴,绿色)随时间的变化。
- 角速度图:角速度(deg/s),显示 Roll Rate(蓝色)、Pitch Rate(橙色)、Yaw Rate(绿色)随时间的变化。
- 数据系列:
- 问题飞行(log_284):显示约52秒的飞行数据,包含姿态角和角速度两个子图。
- 正常飞行(log_287):显示约125秒的飞行数据,包含姿态角和角速度两个子图。
- 关键标记:蓝色点标记快速角度变化(>10°/s),用于突出异常行为。
分析:
- 数据观察:
log_284(问题飞行):- Roll 和 Pitch 轴:姿态角在整个约52秒的飞行过程中保持相对稳定,角度值基本在 $\pm 10^\circ$ 范围内小幅波动,接近水平状态;角速度主要波动在 $\pm 500$ deg/s 范围内,属于正常的控制响应范围。
- Yaw 轴(严重异常):姿态角出现频繁、剧烈的瞬时反转,在多个时间段(3-8秒、15-18秒、20-22秒、25-28秒、30-38秒、40-42秒)内,Yaw 角在 $-170^\circ$ 和 $+170^\circ$ 之间快速跳变,在图表上呈现为近垂直的线条,表明航向在短时间内发生 $340^\circ$ 的巨大变化;角速度出现极端峰值,幅度可达 $\pm 7500$ deg/s,与 Yaw 角的快速跳变完全对应;蓝色点标记集中在 Yaw 角的跳变区间,进一步突出了异常行为的严重性;42秒后 Yaw 角稳定在 $+170^\circ$ 附近。
log_287(正常飞行):- Roll 和 Pitch 轴:姿态角在整个约125秒的飞行过程中持续振荡,角度值在 $-5^\circ$ 到 $+10^\circ$ 范围内波动,围绕 $0^\circ$ 进行小幅调整,这是正常飞行中为保持姿态稳定而进行的持续修正;角速度显示高频、高幅振荡,频繁达到 $\pm 40$ deg/s 的峰值,甚至超出显示范围,表明系统在积极进行姿态修正,这是健康控制系统的正常表现。
- Yaw 轴(非常稳定):姿态角在整个125秒内极其稳定,始终保持在 $95-96^\circ$ 附近,波动极小,几乎呈水平直线,表明航向估计和控制非常可靠;角速度在整个飞行过程中非常接近 0 deg/s,波动仅在 $\pm 2$ deg/s 范围内,表明几乎没有绕 Z 轴的旋转运动,航向保持稳定。
- 关键发现:
- Yaw 轴的极端对比:这是最关键的发现——
log_284中 Yaw 角出现频繁、剧烈的瞬时反转(角速度峰值达 $\pm 7500$ deg/s),而log_287中 Yaw 角极其稳定(角速度接近 0),这种极端对比直接证明了问题出在航向估计或控制逻辑,而非机械结构。 - Roll/Pitch 表现差异:
log_284中 Roll/Pitch 相对稳定但缺乏主动修正,而log_287中 Roll/Pitch 持续振荡但处于健康控制状态,这种差异可能与飞行模式、控制参数或外部干扰有关,但不是导致问题的根本原因。 - 问题定位:Roll/Pitch 在
log_284中基本正常,而 Yaw 出现严重异常,说明问题不在基本姿态控制环路本身,而在更高层(如位置/航向估计或上层控制模式)。Yaw 的频繁跳变通常意味着位置/航向估计不稳定(EKF2 融合质量差),导致航向参考频繁跳变;或控制器在错误反馈信号驱动下不断反向调整,形成失控感。
- Yaw 轴的极端对比:这是最关键的发现——
- 结论验证:
通过这一对比,可以直接观察到:同一架飞机、相似的飞行场景,仅仅因为参数/配置不同,Yaw 控制就可以从稳定可控变为频繁反转、接近失控,从而证明问题根源在于位置估计与控制逻辑的配置不当(特别是 EKF2 航向估计和 Position 模式下的控制逻辑),而非机械结构或硬件故障。
- 数据观察:
3.3 EKF2 内部位置 vs 对外发布位置
位置对比图是 log_284 案例中最关键的证据之一:它将 EKF2 内部估计的位置(来自 estimator_local_position)与飞控对外发布的位置(如 vehicle_local_position)叠加到同一坐标系中,直观展示 EKF2 内部位置估计与对外发布位置之间的差异。
脚本下载:plot_position.py
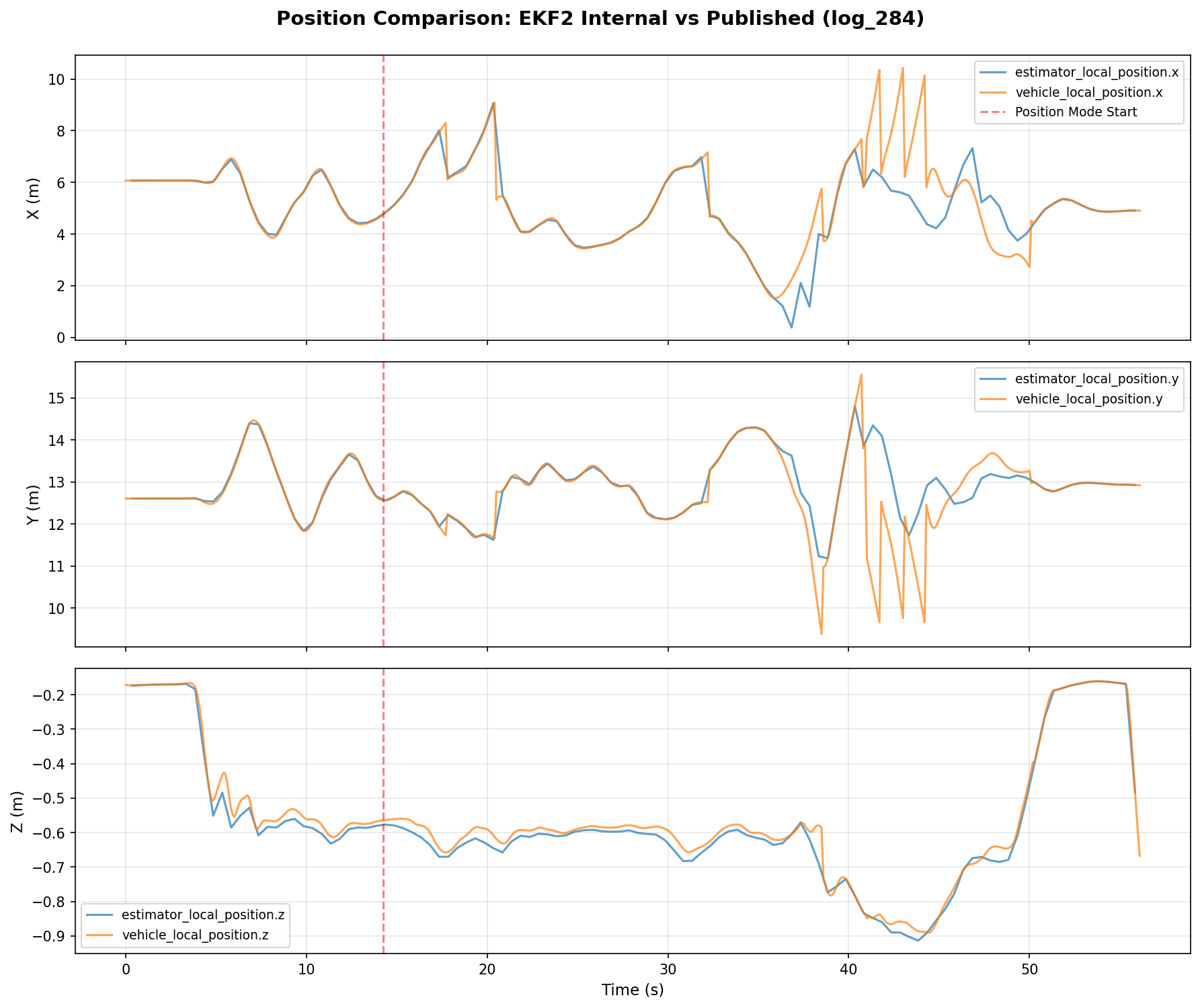
图表含义:
- 横轴:时间(秒),从日志开始后的相对时间,范围 0-55 秒。
- 纵轴:位置(米),三个子图分别显示 X 轴(前后方向)、Y 轴(左右方向)、Z 轴(高度方向)的位置随时间的变化。
- 数据系列:
- 蓝色线:
estimator_local_position(EKF2 内部估计位置),表示 EKF2 滤波器内部的位置估计值。 - 橙色线:
vehicle_local_position(对外发布位置),表示飞控对上层控制和外部模块发布的位置值。
- 蓝色线:
- 关键标记:红色虚线标记 “Position Mode Start”(位置模式启动时间点,约14秒),用于标识模式切换的关键时刻。
分析:
- 数据观察:
- X 轴位置对比(前后方向):
- Position 模式启动前(0-14秒):两条曲线紧密重合,在 4-6 米范围内平滑波动,表明此阶段位置估计整体可信。
- Position 模式启动后(14秒起):橙色线(对外发布位置)立即开始剧烈波动,与蓝色线(内部估计)出现明显分离。
- 异常峰值期(35-45秒):橙色线出现极端跳变,峰值接近 10 米,最低降至 2 米以下,呈现锯齿状、高幅度的来回抖动;蓝色线在此期间也出现振荡,但幅度和频率明显小于橙色线,整体更平滑。
- 恢复期(45秒后):两条曲线重新收敛,从约 6 米平滑下降至 4 米并趋于稳定,表明系统恢复正常。
- Y 轴位置对比(左右方向):
- Position 模式启动前(0-14秒):两条曲线紧密重合,在 12.5-14.5 米范围内稳定波动,与 X 轴表现一致。
- Position 模式启动后(14秒起):橙色线开始显著偏离蓝色线,波动加剧。
- 异常峰值期(35-45秒):橙色线出现极端跳变,峰值接近 15 米,最低降至 10 米以下,与 X 轴同步出现大幅锯齿状抖动;蓝色线同样显示振荡但幅度更小。
- 恢复期(45秒后):两条曲线收敛,从约 12 米平滑上升至 13 米并稳定,系统恢复正常。
- Z 轴位置对比(高度方向):
- 整体一致性:Z 轴两条曲线的一致性明显优于 X/Y 轴,即使在 Position 模式启动后,橙色线的波动也相对较小。
- 0-14秒:两条曲线基本重合,从 -0.2 米平滑下降至 -0.55 到 -0.6 米,保持稳定。
- 14秒后:橙色线波动稍大于蓝色线,但偏差远小于 X/Y 轴。
- 38-42秒:两条曲线同步出现快速下降至 -0.85 米,随后快速上升至 -0.2 米(48秒),橙色线在此期间略显锯齿状,但整体趋势一致。
- X 轴位置对比(前后方向):
- 关键发现:
- X/Y 轴异常跳变:Position 模式启动后,对外发布的 X/Y 位置(橙色线)出现极端跳变和锯齿状抖动,而 EKF2 内部估计(蓝色线)虽然也有振荡,但幅度和频率明显更小,说明问题出在 EKF2 对外发布位置的处理环节,而非内部估计本身。
- Z 轴相对稳定:Z 轴两条曲线的一致性明显好于 X/Y 轴,表明高度估计和发布机制相对正常,问题主要集中在水平位置(X/Y)的发布环节。
- 异常峰值期(35-45秒):这是整个飞行过程中最严重的异常阶段,X/Y 轴对外发布位置出现极端跳变,峰值可达正常值的 2-3 倍,这直接导致 Position 控制器基于错误反馈产生剧烈修正动作。
- 恢复机制:45秒后两条曲线重新收敛,可能与模式切换、飞手介入或 EKF2 重新收敛有关,说明系统具备恢复能力,但异常期间已造成位置控制失效。
- 结论验证:
- 这一对比图与前文对 EKF2
test_ratio和参数EKF2_EV_POS_X/Y过于严格的分析结论形成闭环:EKF2 外部位置数据被拒绝 → 内部估计与对外发布位置分离 → 对外发布位置出现跳变 → Position 控制器基于错误反馈输出错误控制量 → 飞机在 Position 模式下出现失控漂移。 - 在 PX4 的 Position 模式中,飞控会在切入该模式时将当前飞机所在的 X/Y 位置视为新的保持目标点,若对外发布的位置本身发生跳变,控制器会基于错误的位置反馈持续调整控制量,导致飞机出现缓慢甚至剧烈漂移;当退出 Position 模式,改为 Altitude 或 Manual 并由飞手直接控制姿态/油门时,对位置估计的依赖减弱,漂移现象立即消失。
- 这一对比图与前文对 EKF2
- 数据观察:
3.4 加速度计时域对比
加速度计 X 轴和 Y 轴时域对比图,将问题飞行(log_284)与正常飞行(log_287)在同一时间标度下叠加,帮助我们从机体振动和动态响应的角度,验证系统是否处在一个合理的工作环境中。
脚本下载:plot_accel.py
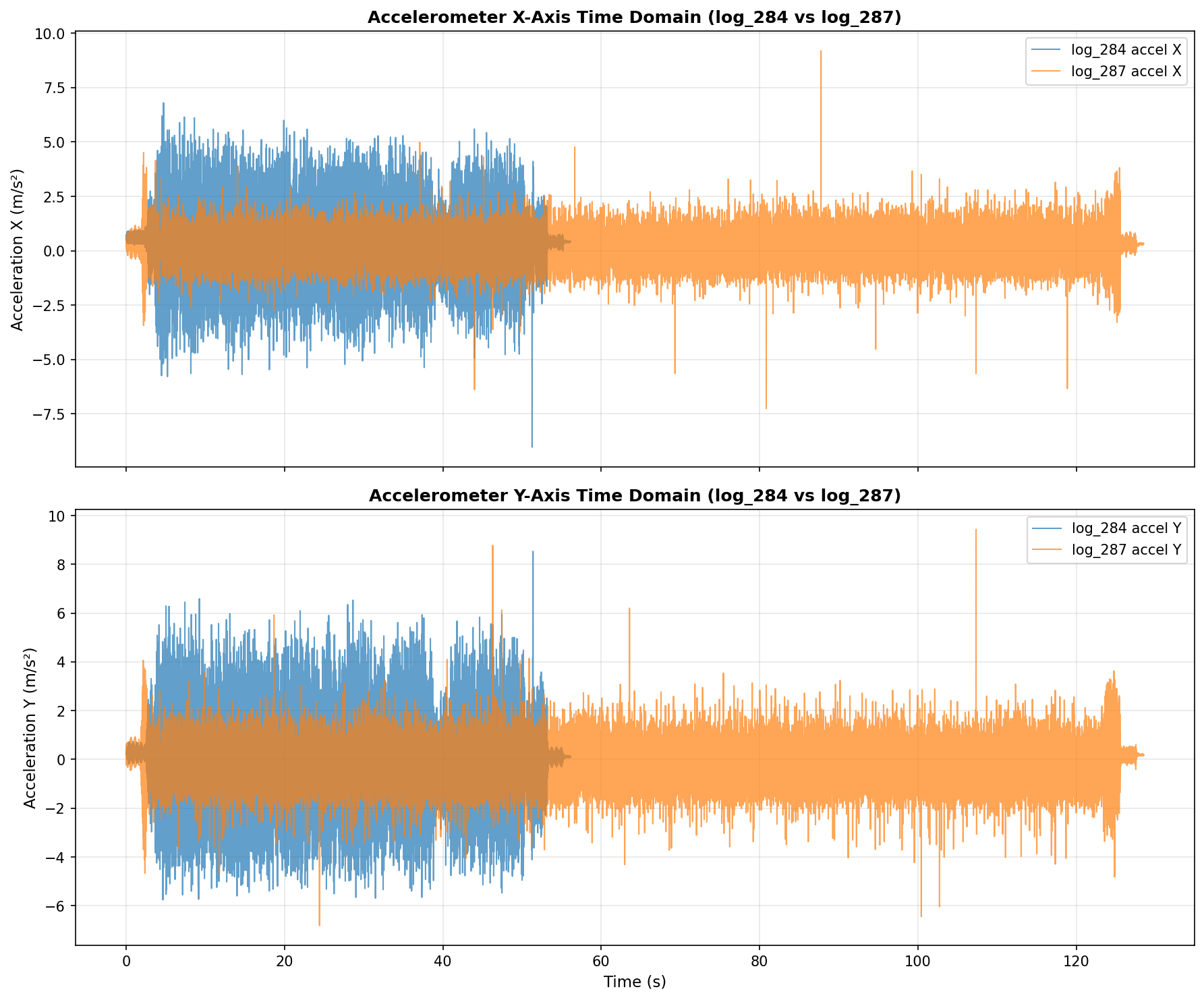
图表含义:
- 横轴:时间(秒),分别对两段日志做相对时间对齐,范围 0-130 秒。
- 纵轴:加速度(m/s²),两个子图分别显示 X 轴(前后方向,通常是机头指向)和 Y 轴(左右方向)的加速度随时间的变化。
- 数据系列:
- 蓝色线:
log_284 accel X/Y(问题飞行),显示存在问题的飞行中的加速度数据。 - 橙色线:
log_287 accel X/Y(正常飞行),显示参数/配置优化后的稳定飞行中的加速度数据。
- 蓝色线:
- 关键信息:通过对比两条曲线可以直观判断系统是否工作在健康的振动水平,识别异常振动和动态响应问题。
分析:
- 数据观察:
log_284(问题飞行):- 在前约50秒内,X 轴和 Y 轴加速度均显示出更大的振幅波动,振荡范围约在 $\pm 6$ 到 $\pm 7.5$ m/s² 之间,明显高于正常水平。
- 曲线呈现不规则、高频的抖动特征,表明此阶段机体振动水平确实偏高。
- 数据在大约50秒后停止记录,这与飞行模式时间线中显示的飞行终止时间点一致。
log_287(正常飞行):- 整体振幅显著更小,大部分时间加速度值稳定在 $\pm 2.5$ m/s² 范围内,基线接近 $0$ m/s²。
- 曲线平滑度明显优于
log_284,表明系统工作在健康的振动环境中。 - 存在少量尖锐的峰值(如45秒、65秒、95秒、105秒附近),这些可能是正常的机动动作(如快速转向、急停等),峰值后迅速恢复到稳定状态。
- 数据持续记录整个测量期间(约130秒),飞行过程完整。
- 关键发现:
- 振动水平对比:
log_284在前50秒内确实存在更高的振动水平,这可能与 Position 模式下的位置控制异常导致的频繁修正动作有关,而非单纯的机械振动问题。 - 系统优化效果:
log_287的平滑曲线证明,在相同的机械结构下,通过优化 EKF2 参数和位置控制逻辑,系统可以工作在低振动、稳定的状态。 - 问题根源验证:通过对比两张图中曲线的整体平滑度和峰值大小,可以直观判断系统是否工作在一个健康的振动水平,为问题诊断提供重要的参考依据。
- 振动水平对比:
- 结论验证:
这一对比进一步验证了前文结论:问题的根源在于 EKF2 配置不当导致的位置估计跳变,进而引发 Position 控制器的异常响应和频繁修正,表现为加速度数据的剧烈波动;而非机械结构或硬件故障导致的振动问题。
- 数据观察:
3.5 Test Ratio 与位置跳变关联分析
Test Ratio 与位置跳变关联分析图是 log_284 案例中最关键的诊断图表之一:它将 EKF2 的 test ratio(测试比率)、数据拒绝事件与位置跳变、Yaw 角异常叠加在同一时间轴上,直观展示 EKF2 数据拒绝机制与位置控制异常之间的因果关系。
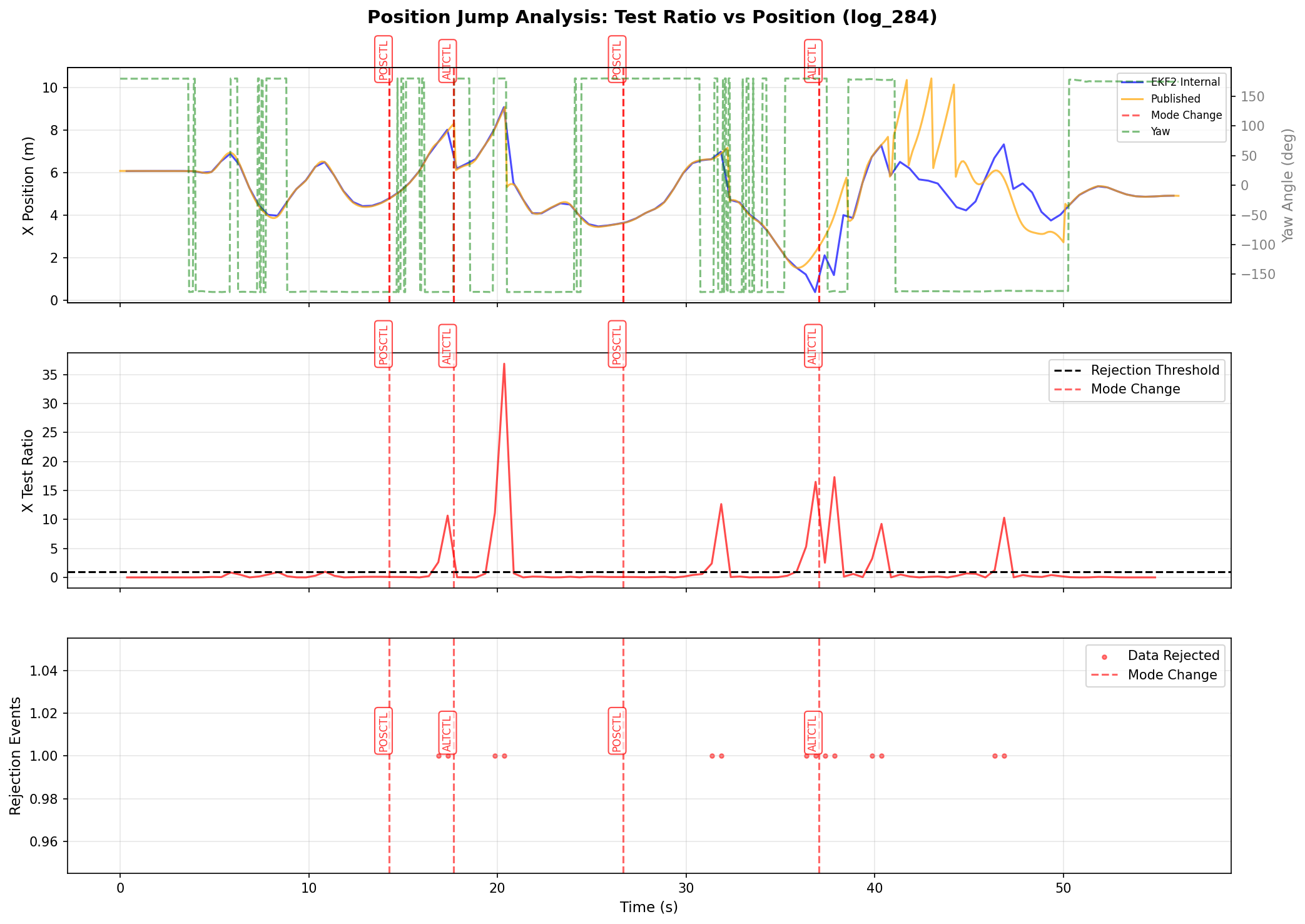
图表含义:
- 横轴:时间(秒),从日志开始后的相对时间,范围 0-55 秒。
- 纵轴:三个子图分别显示不同的数据指标。
- 上子图:X 位置(米,左轴)和 Yaw 角(度,右轴),显示 EKF2 内部估计位置(蓝色)、对外发布位置(橙色)和 Yaw 角(绿色虚线)。
- 中子图:X Test Ratio(无单位),显示 EKF2 对 X 轴位置数据的测试比率(红色实线)和拒绝阈值(黑色虚线,值为 1.0)。
- 下子图:数据拒绝事件(二进制指标),红色点表示数据被拒绝的时刻。
- 关键标记:红色虚线标记 “POSCTL” 和 “ALTCTL”,用于标识飞行模式切换的时间点。
- 关键信息:通过对比三个子图,可以直观观察 test ratio 峰值、数据拒绝事件与位置跳变、Yaw 角异常之间的时间对应关系。
分析:
- 数据观察:
- ALTCTL 模式阶段(0-13.5秒、17.5-25.5秒、37.5-55秒):
- X 位置:EKF2 内部估计(蓝色)与对外发布位置(橙色)紧密重合,在 4-6 米范围内稳定波动,位置估计整体可信。
- Yaw 角:稳定在约 $10^\circ$ 附近,波动较小,航向控制正常。
- X Test Ratio:大部分时间保持在拒绝阈值(1.0)以下,表明传感器数据质量良好,EKF2 正常接受数据。
- 数据拒绝事件:几乎没有或极少,系统运行稳定。
- POSCTL 模式阶段(13.5-17.5秒、25.5-37.5秒):
- X 位置:切换到 POSCTL 模式后,对外发布位置(橙色)开始出现波动和偏差,与内部估计(蓝色)出现分离。
- Yaw 角:在模式切换时刻出现急剧变化,随后在 POSCTL 模式下波动加剧。
- X Test Ratio:出现峰值,在约 13.5 秒、20 秒、32 秒等时刻超过拒绝阈值(1.0),最高峰值可达 30 以上。
- 数据拒绝事件:在 test ratio 超过阈值时出现,与位置跳变和 Yaw 角异常的时间点高度一致。
- 异常峰值期(35-45秒):
- X 位置:对外发布位置出现极端跳变,从约 6 米跳至 9 米,随后降至 2 米以下,呈现锯齿状、高幅度的来回抖动,与内部估计位置严重分离。
- Yaw 角:出现频繁、剧烈的瞬时反转,在 $-150^\circ$ 和 $+150^\circ$ 之间快速跳变,航向控制完全失效。
- X Test Ratio:出现连续多次峰值,数值在 10-15 之间,持续超过拒绝阈值,表明 EKF2 在此阶段频繁拒绝传感器数据。
- 数据拒绝事件:在 35-40 秒期间出现密集的拒绝事件,红色点集中分布,与位置跳变和 Yaw 角异常完全对应。
- 恢复期(45秒后):
- 切回 ALTCTL 模式后,X 位置两条曲线重新收敛,稳定在约 4 米;Yaw 角稳定在 $0^\circ$ 附近;test ratio 降至阈值以下;数据拒绝事件消失,系统恢复正常。
- ALTCTL 模式阶段(0-13.5秒、17.5-25.5秒、37.5-55秒):
- 关键发现:
- 时间对应关系:test ratio 峰值、数据拒绝事件与位置跳变、Yaw 角异常在时间上高度一致,特别是在 POSCTL 模式下和异常峰值期(35-45秒),这种对应关系清晰地表明 EKF2 数据拒绝机制是导致位置跳变的直接原因。
- 模式切换触发:每次从 ALTCTL 切换到 POSCTL 时,test ratio 都会出现峰值并超过阈值,导致数据拒绝事件,随后位置跳变和 Yaw 角异常开始出现;切回 ALTCTL 后,test ratio 恢复正常,位置和 Yaw 角也趋于稳定。
- 异常峰值期的严重性:35-45 秒期间,test ratio 连续多次超过阈值,数据拒绝事件密集出现,对应最严重的位置跳变(峰值可达正常值的 2-3 倍)和 Yaw 角失控($340^\circ$ 的巨大变化),这是整个飞行过程中最危险的阶段。
- EKF2 数据拒绝机制的影响:当 test ratio > 1.0 时,EKF2 拒绝外部位置数据(如视觉定位数据),只能依赖 IMU 预测,位置逐渐漂移;下次数据被接受时,位置突然"跳回",形成锯齿状跳变;这种不稳定的位置反馈导致 Position 控制器产生错误的控制指令,进而引发 Yaw 角异常和水平位置漂移。
- 结论验证:
- 这一关联分析图与前文对 EKF2
test_ratio和参数EKF2_EV_POS_X/Y过于严格的分析结论形成完整的因果链条:EKF2 参数设置过小(EKF2_EV_POS_X/Y过小) → innovation test 过于严格 → test ratio 频繁超过阈值 → 外部位置数据被拒绝 → 内部估计与对外发布位置分离 → 对外发布位置出现跳变 → Position 控制器基于错误反馈输出错误控制量 → Yaw 角异常和水平位置漂移 → 飞机在 Position 模式下出现失控漂移。 - 在 ALTCTL 模式下,系统对水平位置估计的依赖较弱,即使出现数据拒绝,影响也较小;但在 POSCTL 模式下,位置估计的准确性直接决定控制性能,数据拒绝导致的位置跳变会立即引发控制异常,这解释了为什么问题只在 POSCTL 模式下暴露出来。
- 这一关联分析图与前文对 EKF2
- 数据观察:
4. 问题诊断
基于 log_284 案例的可视化分析,本节系统性地讲解如何通过图表识别和诊断飞行过程中的常见问题,并提供相应的解决方案。
4.1 位置估计异常分析
基于 log_284 案例的完整分析,位置估计异常问题具有以下典型特征:
问题症状:
estimator_local_position(EKF2 内部估计位置)与vehicle_local_position(对外发布位置)出现明显偏差- X/Y 轴位置出现锯齿状跳变,位置在相邻采样之间快速来回抖动
- Z 轴(高度)相对稳定,问题主要集中在水平位置(X/Y)
- Yaw 角出现频繁、剧烈的瞬时反转
- 问题仅在 Position 模式下暴露,在 Altitude 模式下表现正常
诊断方法:
问题原因分析(基于 log_284):
EKF2 数据拒绝机制触发:
- 当
test_ratio > 1.0时,EKF2 拒绝外部位置数据(如视觉定位数据),只能依赖 IMU 预测 - 位置逐渐漂移;下次数据被接受时,位置突然"跳回",形成锯齿状跳变
- 在
log_284中,test ratio 峰值可达 30 以上,大部分在 5-20 之间
- 当
参数设置过小导致过度拒绝:
EKF2_EV_POS_X/Y设置过小(如 0.1),导致 innovation test 过于严格- 视觉数据频繁被拒绝,特别是在 Position 模式启动时和异常峰值期(35-45秒)
- 数据拒绝事件集中在模式切换时刻和异常峰值期,与位置跳变完全对应
控制回路反馈振荡:
- Position 模式下,位置控制器基于不稳定的位置反馈产生控制指令
- 位置跳变导致控制器不断尝试修正"错误"的位置,形成振荡反馈
- 这种振荡反馈进一步加剧了位置估计的不稳定性,形成恶性循环
模式依赖性问题:
- 在 Altitude 模式下,系统对水平位置估计的依赖较弱,即使出现数据拒绝,影响也较小
- 在 Position 模式下,位置估计的准确性直接决定控制性能,数据拒绝导致的位置跳变会立即引发控制异常
- 这解释了为什么问题只在 Position 模式下暴露出来
4.2 解决方案
基于 log_284 案例的诊断结果,建议按照以下问题排查清单逐步检查和调整:
问题排查清单:
检查并调整 EKF2 参数:
- 检查
EKF2_EV_POS_X和EKF2_EV_POS_Y的当前值,如果过小(如 0.1),建议调整到 0.3-0.5- 这些参数定义了外部位置数据(如视觉定位)的标准偏差
- 增大这些值可以放宽 innovation test 的严格程度,减少数据被过度拒绝的情况
- 检查
EKF2_EVP_GATE(innovation gate 阈值),如果默认值为 3.0,可以尝试调整到 5.0- 这个参数控制 innovation test 的拒绝阈值,增大后可以减少数据拒绝
- 调整后重新飞行并记录日志,检查 test ratio 是否降低,数据拒绝事件是否减少,确认位置跳变和 Yaw 角异常是否消失
- 检查
检查外部定位数据质量:
- 验证视觉定位数据(VRPN)的噪声水平
- 检查数据转发脚本的过滤逻辑是否合理
- 确认数据更新频率是否在合理范围内(建议 20-50 Hz)
- 验证数据是否包含异常值或跳变
- 优化数据预处理流程
- 在数据转发脚本中添加异常值过滤
- 实现数据平滑滤波,减少噪声
- 确保数据时间戳同步准确
- 验证视觉定位数据(VRPN)的噪声水平
验证传感器校准状态:
- 重新校准 IMU(加速度计、陀螺仪)
- 使用 PX4 的校准工具进行完整校准
- 确保传感器数据质量,减少 IMU 预测误差
- 检查传感器安装情况
- 确认传感器安装牢固,无松动
- 检查是否存在电磁干扰
- 验证传感器数据是否在合理范围内
- 重新校准 IMU(加速度计、陀螺仪)
考虑固件和配置优化:
- 检查是否有可用的固件升级
- 考虑升级/降级 PX4 固件版本,可能包含位置处理逻辑的优化
- 查看固件更新日志,了解 EKF2 相关的改进
- 根据实际飞行环境调整其他相关参数
EKF2_AID_MASK:控制哪些辅助数据源被使用EKF2_HGT_MODE:高度估计模式选择- 根据实际飞行环境和传感器配置进行优化
- 检查是否有可用的固件升级
调整飞行策略(临时方案):
- 避免频繁模式切换
- 在 Position 模式下保持稳定飞行,减少模式切换频率
- 如果必须切换,确保在 Altitude 模式下停留足够时间,让 EKF2 重新收敛
- 如果问题持续存在,考虑使用其他飞行模式
- 可以使用 Altitude 模式进行飞行
- 或者使用 Manual 模式,由飞手直接控制姿态和油门
- 避免频繁模式切换
验证和测试注意事项:
- 每次参数调整后,先进行地面测试和短时间悬停测试
- 记录日志并对比调整前后的 test ratio、数据拒绝事件和位置稳定性
- 逐步调整参数,避免一次性大幅修改导致其他问题
- 参考
log_287(正常飞行)的参数配置,作为调整的参考基准
4.3 小结
本文档以 log_284 为实际案例,展示了使用 pyulog 库分析 PX4 飞控日志的完整流程。通过系统性的数据提取、可视化和诊断分析,成功定位了 Position 模式下位置跳变问题的根本原因。
log_284 案例要点:
- 问题现象:切换到 Position 模式后,X/Y 轴出现锯齿状位置跳变,Yaw 角频繁反转
- 根本原因:EKF2 参数(
EKF2_EV_POS_X/Y)设置过小,导致 innovation test 过于严格,视觉数据频繁被拒绝 - 诊断方法:通过对比 EKF2 内部估计位置与对外发布位置、分析 test ratio 和数据拒绝事件、观察飞行模式切换与异常的时间对应关系,建立了完整的因果链条
- 解决方案:调整
EKF2_EV_POS_X/Y(从 0.1 调整到 0.3-0.5)和EKF2_EVP_GATE(从 3.0 调整到 5.0),问题得到解决
参考文档
请我喝杯咖啡
如果本文对你有帮助,欢迎打赏支持作者。

