Aircraft Simulation
Airsim + PX4 SITL + MAVSDK 系统集成踩坑记录
1. 网络拓扑
graph TB
subgraph "WSL2"
subgraph "地面站"
MAVSDK[MAVSDK
发出UDP:14540]
AirSimAPI[AirSim API
TCP:41451]
end
PX4SITL[PX4 SITL
接收UDP:14560]
end
subgraph "Windows"
AirSim[AirSim
RPC:41451
TCP:4560]
AirSimCamera[AirSim相机]
end
MAVSDK -->|MAVLink| PX4SITL
AirSimAPI -->|RPC| AirSim
PX4SITL -->|TCP| AirSim
AirSimAPI -->|RPC| AirSimCamera
style MAVSDK fill:#f3e5f5
style AirSimAPI fill:#fff3e0
style PX4SITL fill:#e8f5e8
style AirSim fill:#e1f5fe
style AirSimCamera fill:#ffebee
1.1 端口配置详解
核心端口分配与说明
WSL2: MAVSDK
- 地址:
udpin://127.0.0.1:14540(MAVLink) - 说明: MAVSDK 默认监听 PX4 SITL 的 MAVLink 数据流(14540 为 MAVLink 默认端口),因为PX4 SITL无法广播UDP,MAVSDK应放到PX4同一环境运行(参见2)
- 方向: PX4 SITL → 地面站
WSL2: AirSim API
- 地址:
0.0.0.0:41451(RPC) - 说明: AirSim 提供的默认RPC 接口,用于外部程序(Python/C++ 脚本等)调用控制 API
- 方向: 地面站 ↔ AirSim
Windows: AirSim (PX4 桥接)
- 地址:
0.0.0.0:4560(TCP) - 说明: PX4 SITL 运行在 WSL2 中,通过 PX4 桥接接口与 Windows 侧 AirSim 交互,
0.0.0.0监听的IP实际为宿主机在 WSL2 网络中的可访问地址(通常是 192.168.x.x 或/etc/resolv.conf里的网关地址,在settings.json中也要同步修改地址 - 方向: PX4 SITL ↔ AirSim
1.2 AirSim Settings.json 配置示例
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor",
"RpcEnabled": true,
"RpcServerPort": 41451,
"ControlIp": "0.0.0.0",
"Vehicles": {
"Drone1": {
"VehicleType": "PX4Multirotor",
"X": 0, "Y": 0, "Z": -5,
"UseSerial": false,
"UseTcp": true,
"TcpPort": 4560,
"LocalHostIp": "0.0.0.0",
"ExternalIp": "0.0.0.0",
"Cameras": {
"front_center": {
"X": 0.5, "Y": 0, "Z": 0,
"Pitch": 0, "Roll": 0, "Yaw": 0,
"CaptureSettings": [
{
"Width": 1920,
"Height": 1080,
"ImageType": 0,
"FOV_Degrees": 90
}
]
}
},
"Parameters": {
"NAV_RCL_ACT": 0,
"NAV_DLL_ACT": 0,
"COM_OBL_ACT": 1,
"LPE_LAT": 47.641468,
"LPE_LON": -122.140165
}
}
}
}
2. 坑之一:PX4 SITL 广播和配置更改限制
问题描述
- 现象: PX4 SITL不支持动态配置更改和广播通信
- 原因: SITL模式下的PX4固件功能受限,无法像真实硬件一样支持所有MAVLink命令,param 等命令并不会真的保存
解决方案
- 在同一环境下使用PX4 SITL和MAVSDK
class PX4SITLManager:
def __init__(self):
self.drone = System()
# 使用本地连接
self.connection_string = "udpin://127.0.0.1:14540"
def connect(self):
await self.drone.connect(system_address=self.connection_string)
async for state in self.drone.core.connection_state():
if state.is_connected:
break
3. 坑之二:AirSim 相机集成问题
3.1 RPC通信与MAVLink不一致
问题描述
- 现象: PX4 SITL 无法直接调用 AirSim 相机
- 原因: PX4使用MAVLink(WSL2),AirSim相机走RPC(Windows),协议与位置均不同步
解决方案:双API架构
import airsim
from mavsdk import System
class DualAPIManager:
def __init__(self):
# MAVSDK用于飞行控制
self.drone = System()
# AirSim API用于相机控制
self.airsim_client = airsim.MultirotorClient()
async def setup_connections(self):
# 连接MAVSDK
await self.drone.connect(system_address="udpin://127.0.0.1:14540")
# 连接AirSim (Windows RPC 41451)
self.airsim_client.confirmConnection()
# 此处相机名称一定要填settings中设置的相机名称,否则会导致仿真崩溃,如果不填名称默认使用低分辨率相机“0”
def take_photo(self, camera_name: str = "front_center"):
# 使用AirSim API拍照 (Windows RPC 41451)
responses = self.airsim_client.simGetImages([
airsim.ImageRequest(camera_name, airsim.ImageType.Scene)
])
return responses[0]
async def fly_and_capture(self, waypoints):
# 使用MAVSDK控制飞行
for wp in waypoints:
await self.drone.action.goto_location(wp.lat, wp.lng, wp.alt)
# 使用AirSim API拍照
photo = self.take_photo()
# 处理照片...
3.2 相机 API Bug 与解决方案
问题描述
- 现象: AirSim
simGetCameraInfo()API导致仿真进程崩溃 - 原因:
- AirSim相机信息获取API存在内存泄漏问题
- 当调用无效相机名称或其他未知问题时,会导致仿真进程崩溃
问题API详情:
def simGetCameraInfo(self, camera_name, vehicle_name = '', external=False):
"""
Get details about the camera
Args:
camera_name (str): Name of the camera
vehicle_name (str, optional): Vehicle which the camera is associated with
external (bool, optional): Whether the camera is an External Camera
Returns:
CameraInfo: Camera information object
"""
return CameraInfo.from_msgpack(self.client.call('simGetCameraInfo', str(camera_name), vehicle_name, external))
崩溃原因:
- 当
camera_name参数无效或不存在时,RPC调用失败 CameraInfo.from_msgpack()解析失败导致内存访问错误- 其他未知原因
解决方案
- 直接使用settings.json中的相机名进行拍照,可以对相机参数进行有效调整
def take_photo(self, camera_name: str = "front_center", image_type: str = "Scene"):
if camera_name not in self.cameras:
raise ValueError(f"Unknown camera: {camera_name}")
request = airsim.ImageRequest(camera_name, airsim.ImageType.Scene)
responses = self.client.simGetImages([request])
return responses[0]
def take_multiple_photos(self, camera_names: list = None):
if camera_names is None:
camera_names = ["front_center", "downward"]
requests = []
for camera in camera_names:
if camera in self.cameras:
requests.append(airsim.ImageRequest(camera, airsim.ImageType.Scene))
return self.client.simGetImages(requests)
3.3 AirSim Settings 相机配置
4. 坑之三:Windows Defender 防火墙端口配置
- 如果不放开对应端口,会导致PX4 SITL和Airsim通信失败
4.1 防火墙端口配置步骤
步骤1:打开 Windows Defender 防火墙高级设置
# 方法1:通过控制面板
控制面板 → 系统和安全 → Windows Defender防火墙 → 高级设置
# 方法2:通过运行命令
wf.msc
步骤2:添加入站规则
- 选择"入站规则" → “新建规则”
- 规则类型:选择"端口"
- 协议和端口:
- 选择"TCP"
- 选择"特定本地端口"
- 输入端口:
14540,14550,14560,41451,4560
- 操作:选择"允许连接"
- 配置文件:勾选"域"、“专用”、“公用”
- 名称:输入"AirSim PX4 SITL 端口"
步骤3:添加出站规则
- 选择"出站规则" → “新建规则”
- 重复上述步骤,但选择"出站规则"
4.2 验证端口连接
# 在WSL2中测试端口连通性
telnet <Windows_IP> 14540
telnet <Windows_IP> 41451
telnet <Windows_IP> 4560
# 使用netstat检查端口监听状态
netstat -an | findstr :14540
netstat -an | findstr :41451
netstat -an | findstr :4560
4.3 常见问题解决
- 端口被占用:使用
netstat -ano | findstr :端口号查看占用进程 - 防火墙阻止:检查Windows Defender防火墙规则是否正确配置
- WSL2网络问题:重启WSL2服务
wsl --shutdown
5. 环境配置与调试指南
5.1 PX4 SITL 环境变量配置
# 配置PX4与AirSim的连接地址
export PX4_SIM_HOSTNAME=<Windows_IP>
export PX4_SIM_HOST_ADDR=<Windows_IP>
# 启动PX4 SITL
make px4_sitl_default none_iris
# 临时打开端口与QGC连接
mavlink start -p -o 14550
5.2 WSL2 双虚拟环境配置
- 为了在Windows下和WSL2下快速开发,可以使用双虚拟环境配置的方式
# Windows下WSL2的双虚拟环境激活命令
cd /mnt/c/Users/Username/Documents/ProjectLocation
source venv_wsl/bin/activate
# 环境说明:
# - Windows中使用.venv
# - WSL2中使用新的虚拟环境venv_wsl
5.3 快速修复与调试命令
端口配置问题
# 检查端口占用
netstat -ano | findstr :14540 # Windows
lsof -i :14540 # Linux/macOS
# 快速修复:重启PX4 SITL
pkill -f px4_sitl
make px4_sitl gazebo
参考文档
AirSim Agent 大模型驱动无人机
AirSim Agent来源于微软开源项目PromptCraft-Robotics ,提供了由大模型驱动机器人的解决方案。
1. AirSim 安装、编译和使用尝试
1.1 开发环境与编译平台建议
- 硬件/系统
- 建议 ≥16GB 内存;Windows 11 优先。Mac/Linux 需自行编译 AirSim。
- Python 与工具
- 使用 conda 与 JupyterLab,IDE 推荐 PyCharm
- 创建/启用环境与安装:
conda create -n airsim_agent python=3.10
conda activate airsim_agent
pip install jupyterlab
- 克隆本仓库后,用 PyCharm 打开项目根目录。
- 大模型 API
- 任选兼容 OpenAI SDK 的平台(如火山方舟、阿里云、腾讯云等)。
- 依赖冲突提示
- AirSim 的 tornado 与 JupyterLab 可能冲突,不建议 pip install airsim。
- 采用本地包引入:
import sys
sys.path.append('../external-libraries') # 或绝对路径
import airsim
- 编译与平台建议
- Windows:优先使用现成可执行场景(无需源码编译),上手最快。 - Linux/macOS:按官方文档编译 AirSim 与 UE 插件,或参考 UE5 社区分支(如 Cosys-AirSim、Colosseum)以适配新平台。
- 文档参考:https://github.com/Microsoft/AirSim/blob/main/docs/
1.2 AirSim 仿真场景搭建
简介:基于 Unreal Engine,支持无人机/车辆与多传感器,适配 HIL/SIL;适合数据生成与高风险场景复现。
现状:官方仓库已归档但可用;可参考 UE5 社区分支(Cosys-AirSim、Colosseum)。
推荐场景:论文《ChatGPT for Robotics: Design Principles and Model Abilities》配套环境
- 下载:https://github.com/microsoft/PromptCraft-Robotics/releases/tag/1.0.0
- 解压后直接运行,适合快速上手。
- 参考链接
- Releases:https://github.com/microsoft/airsim/releases
- 文档:https://microsoft.github.io/AirSim/
1.3 无人机基本控制
- 连接与初始化
import sys
sys.path.append'../external-libraries')
import airsim
client = airsim.MultirotorClient() # ip 不写是本地
client.confirmConnection()
client.enableApiControl(True)
client.armDisarm(True)
- 起降与轨迹
client.takeoffAsync().join()
client.moveToZAsync(-3, 1).join() # NED 坐标,Z 负向为上
client.moveToPositionAsync(5, 0, -3, 1).join() # 航点飞行
client.moveOnPathAsync([airsim.Vector3r(5,0,-3), ...], 1).join()
client.landAsync().join()
client.armDisarm(False)
client.enableApiControl(False)
- 状态获取对比
- simGetVehiclePose():传感器级位姿,可能含噪声;拟真。
- simGetGroundTruthKinematics():物理引擎真值(含速度/加速度);用于控制/验证。
- 注意事项
- 异步 API 多为 ...Async(),需 .join() 串联确保动作顺序。
- 坐标系为 NED:moveToZAsync(-3, ...) 表示上升到 3 米(Z 取负)。
1.4 视觉感知与图像采集
- 相机与类型
- 位置:front_center/front_right/front_left/bottom_center/back_center(兼容旧 ID "0"~"4")。
- 类型:Scene,DepthPlanar,DepthPerspective,DepthVis,Segmentation,SurfaceNormals,Infrared 等。
- 采集示例(OpenCV + Matplotlib)
import cv2, time, numpy as np, matplotlib.pyplot as plt
from airsim import ImageType
client = airsim.MultirotorClient(); client.confirmConnection()
client.enableApiControl(True); client.armDisarm(True)
client.takeoffAsync().join()
camera_name = '0' # 或 'front_center'
image_type = ImageType.Scene
resp = client.simGetImage(camera_name, image_type)
if resp:
img_bgr = cv2.imdecode(np.frombuffer(resp, np.uint8), cv2.IMREAD_UNCHANGED)
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb); plt.axis('off'); plt.show()
client.landAsync().join()
client.armDisarm(False); client.enableApiControl(False)
- 注意事项
- 并发:多线程/多进程均可,但每个线程/进程需独立创建 MultirotorClient,不可共享。
- 显示:Notebook 用 Matplotlib;桌面窗口显示可用 a_cv2_imshow_thread。
1.5 多无人机控制
- 多机配置
- 将 1-airsim_basic/settings.json 复制为:
- Windows:C:\Users\<用户名>\Documents\AirSim\settings.json
- 重启模拟器生效。
- 控制要点
- 在 API 调用中通过 vehicle_name="UAV1"(或 "UAV2", "UAV3")区分不同无人机。
- 示例(并发起飞/定高):
client = airsim.MultirotorClient()
for i in range(3):
name = f"UAV{i+1}"
client.enableApiControl(True, name)
client.armDisarm(True, name)
client.takeoffAsync(vehicle_name=name)
for i in range(3):
name = f"UAV{i+1}"
client.moveToZAsync(-3, 1, vehicle_name=name)
- 注意事项
- 名称需与 settings.json 保持一致;多机并发建议为每机建立独立控制流程。
- 协同/编队时注意全局 NED 与机体坐标的转换。
1.6 快速上手流程
conda 创建
airsim_agent(Python 3.10),安装jupyterlab。克隆Airsim Agent仓库,打开项目根目录。
下载 PromptCraft-Robotics 场景并解压运行:
https://github.com/microsoft/PromptCraft-Robotics/releases/tag/1.0.0在
1-airsim_basic/3-airsim_basic.ipynb执行连接/起飞/轨迹/降落。在
1-airsim_basic/4-airsim_camera.ipynb采集与显示图像。复制
1-airsim_basic/settings.json至用户目录,按需多机控制。
2. 指令封装和OpenAI SDK调用
2.1 SDK封装设计与规则
目标:将底层 AirSim API 语义化、原子化,便于大模型/自然语言直接调用
封装规则
- 语义化接口:内部隐藏 NED 坐标 转换,对外使用直观语义(如 fly_to([x,y,正高度]) 自动处理 Z 符号)
- 功能原子化:每个方法只做一件事(如 takeoff,land,set_yaw,fly_to)
- 参数/返回标准化:统一使用简单类型(如 get_drone_position()->[x,y,z],get_yaw()->角度)
- 异步转同步:统一 .join(),保证顺序执行,减少并发不确定性
- 异常与缺省:适度重试/返回安全缺省值(如 get_position 等待对象可用)
- 单位一致性:内部弧度/角度转换,对外一律角度(如 get_yaw() 返回“度”)
- 对象别名映射:objects_dict 统一自然语言到 UE 对象名(如 "car"->"StaticMeshActor_10")
对象映射
{"turbine1":"BP_Wind_Turbines_C_1","car":"StaticMeshActor_10","solarpanels":"StaticMeshActor_146",...}典型方法(节选)
class AirSimWrapper:
def __init__(self):
self.client = airsim.MultirotorClient()
self.client.confirmConnection()
self.client.enableApiControl(True)
self.client.armDisarm(True)
def takeoff(self):
self.client.takeoffAsync().join()
def land(self):
self.client.landAsync().join()
def fly_to(self, point: list[float]):
z = -point[2] if point[2] > 0 else point[2]
self.client.moveToPositionAsync(point[0], point[1], z, 5).join()
def get_drone_position(self) -> list[float]:
pose = self.client.simGetVehiclePose()
return [pose.position.x_val, pose.position.y_val, pose.position.z_val]
def set_yaw(self, yaw_degree: float):
self.client.rotateToYawAsync(yaw_degree, 5).join()
- 注意事项
- NED 坐标统一语义:向上飞 Z 减小;封装中已处理,外部仅关注“正高度”表达
- 顺序控制:连续动作务必 .join();复杂流程拆小步更稳健
2.2 OpenAI 等 SDK 调用
- 客户端初始化(OpenAI 协议兼容,含国产云)
import os
from openai import OpenAI
API_KEY = os.getenv("ARK_API_KEY")
client = OpenAI(
base_url="https://ark.cn-beijing.volces.com/api/v3",
api_key=API_KEY,
)
- 非流式调用示例
completion = client.chat.completions.create(
model="doubao-1-5-pro-32k-250115",
messages=[{"role":"user","content":"常见无人机仿真系统有哪些?"}],
temperature=0.1,
)
print(completion.choices[0].message.content)
- 角色与多轮对话
- system:设定身份/约束(如仅输出 Python 代码块)
- assistant:历史回复纳入 messages 维护上下文
- 截断策略:messages = chat_history[-10:] 控制 Token 消耗
- 代码片段抽取
import re
def extract_python_code(content: str) -> str|None:
blocks = re.findall(r"```(.*?)```", content, flags=re.DOTALL)
if not blocks: return None
code = "\n".join(blocks)
return code[7:] if code.startswith("python") else code
- 参数建议与注意
- temperature 低值(0.1~0.3)更稳健;配合 max_tokens 控制成本;必要时 top_p 微调多样性
- 密钥安全:使用环境变量;避免明文
- 长对话优化:定期截断/摘要,降低成本与延迟
- 错误处理:区分 API 错误/限流并退避重试
2.3 提示词工程与函数调用
- 核心做法
- 结构化提示:角色设定(system)+ 能力边界 + 输出格式约束(仅代码块)
- 函数白名单:明确可调用函数/参数/返回,降低幻觉与越权
- 错误模板:参数校验/错误码标准化返回,便于自动化处理
- 函数描述模板(简版)
aw.takeoff() - 起飞无人机
aw.land() - 无人机着陆
aw.get_drone_position() -> [x,y,z]
aw.fly_to([x,y,z]) - 飞到目标点(NED 已封装)
aw.get_position(object_name) -> [x,y,z]
- 方式对比(要点)
- Prompt 直控:快、灵活,但易失控
- Function Calling:可控性强、工程化好,需前期函数设计
- MCP:多模型/多工具协作标准化,复杂度更高
2.4 知识库构建
- 目录与角色
- system_prompts/:系统级角色设定(行为边界、输出格式、可用库、禁止事项)
- prompts/:领域知识/功能清单(函数白名单、对象名称映射、坐标与运动语义、示例)
- 内容关键点
- 角色设定:仅输出 Python 代码块;允许 math,numpy;使用已定义的 aw 对象
- 函数白名单:列出 aw.takeoff/land/fly_to/get_position/get_drone_position/set_yaw/... 的参数与返回
- 对象映射:提供“中文目标名 ↔ 英文内部名”(与 objects_dict 同步),如“汽车 ↔ car”
- 坐标语义:声明 NED 规则与“向上/Z 减小”的高度表达;给出相对运动示例(YZ 平面、三角函数)
- 输出格式:仅代码块,或“代码 + 一句话用途说明”
- 风控约束:禁止文件/网络/系统命令;只调用白名单函数
- 示例(节选,
prompts/aisim_lession24.txt)
以下函数可用:
aw.takeoff();aw.land();aw.get_drone_position()->[x,y,z];
aw.fly_to([x,y,z]);aw.get_position(object_name)->[x,y,z];aw.set_yaw(yaw_deg)
对象映射(中文→英文):
汽车→car;风力发电机1→turbine1;太阳能电池板→solarpanels;塔1→tower1 …
坐标/运动规则:
使用 NED;向上飞 Z 减小;YZ 平面相对位移可用三角函数计算
输出格式:
```python
aw.takeoff()
- 加载方式
- AirSimAgent(knowledge_prompt="prompts/aisim_lession24.txt", system_prompts="system_prompts/airsim_basic_cn.txt")
- 更新知识库后,重新初始化 AirSimAgent 生效
- 编写建议
- 精炼:避免冗长描述,控制在数百行内,降低 Token 压力
- 可维护:分文件管理场景/任务;统一对象命名与坐标规则
- 一致性:与 airsim_wrapper.py 方法签名、objects_dict 保持一致
2.4 基本飞行控制示例
- Agent 封装(
airsim_agent.py)
from openai import OpenAI
class AirSimAgent:
def __init__(self, system_prompts="system_prompts/airsim_basic_cn.txt",
knowledge_prompt="prompts/aisim_basic_cn.txt", chat_history=None):
self.client = OpenAI(base_url="https://ark.cn-beijing.volces.com/api/v3", api_key=API_KEY)
self.chat_history = []
# 省略:载入 system 与知识库提示
def ask(self, prompt: str) -> str:
# 省略:构造 messages 并调用 chat.completions.create
...
def extract_python_code(self, content: str) -> str|None:
# 同上文
...
def process(self, command: str, run_python_code=False) -> str|None:
resp = self.ask(command)
code = self.extract_python_code(resp)
if run_python_code and code:
exec(code)
return code
- 飞到汽车上方(示例)
car_pos = aw.get_position("car")
target = [car_pos[0], car_pos[1], car_pos[2] - 3] # NED:上方 3m -> Z 减小
aw.fly_to(target)
- 注意事项
- 知识库中声明 对象中英映射 与 NED 规则
- 执行模式可切换:调试(只生成)/实操(生成并执行)
2.5 复杂指令:风力发电机检查
- 任务模式
- 单步指令 + 等待下一步(人工在回路)、简单 Workflow、Agent 自主执行
- 典型步骤
- 靠近 turbine1/turbine2,沿 X 轴保持距离;设置高度(Z 为负表示上方)
- 叶片检查:上/右下/左下等相对位移,使用三角函数在 YZ 平面 规划
- 机头朝向:set_yaw(角度)
- 注意事项
- 相同类型对象需澄清(两台涡轮机、三座塔);未指明时请求澄清,避免假设
- 始终以 NED 为基准描述相对运动,确保高度/方向一致性
2.6 完整任务:太阳能发电矩阵巡检
目标:在阵列上方 5m 执行“割草机”航迹(蛇形扫掠),覆盖 10 行
关键设定
- 面板宽 30m(X)、长 50m(Y),按长度分 10 行
- 规则:行末换向,右端下移一行再左扫;左端下移一行再右扫,直到完成
- 示例要点
- 基于当前位置,明确“向右/向左/向前/向后”的坐标增减规则(在知识库中定义)
- 保持 恒定高度 5m(NED:Z 固定为 -5)
- 注意事项
- 逐段生成与执行更稳健:便于监控、容错与现场修订
- 若引入视觉/定位闭环,可在入列/行末对齐处加入校正点
3. 思考:历史对话数据处理的可能性
3.1 目标与约束
目标:在保证无人机控制上下文正确性的前提下,尽量减少对话上下文体积,提升响应速度与吞吐。
约束:AirSim 场景知识与 API 清单相对稳定,宜在初始化阶段外置加载,运行期不重复注入。
3.2 核心策略
- 上下文最小化
- 仅保留最近 K 轮有效对话(如 4~8 轮),并固定保留首条 system。
- 将长历史进行状态化摘要(如 pos、goal、step、alt、yaw 等短键 JSON),以后续请求用“状态+新指令”替代完整历史。
- 消息归一与去重:术语固定表达(如“向上飞 Z 减小”),移除重复确认/日志,减少冗余。
- 知识外置与结构化输出
- 将函数白名单、对象映射、NED 规则等固定知识放入 system_prompts/ 与 prompts/,仅初始化注入一次。
- 强制仅输出代码块或结构化 JSON,弱化自然语言解释,减少无效 Token。
- 函数调用优先:用参数承载上下文,减少长文本描述;统一 aw.* 代码风格,压缩差异化开销。
- 缓存与执行控制
- 会话/跨会话缓存:对“同指令→同代码”结果命中即复用;将“后空翻/割草机”等常用流程抽为宏指令。
- 分步生成与执行:长流程拆分多步,降低单次上下文体积与失败成本。
- 参数与响应控制:低温度(0.1~0.3)、限制 max_tokens,必要时小幅 top_p;区分 API 错误/限流并做退避重试。
4. 大模型知识库构建
4.1 通用层级与加载策略
- 分层组织
- system:角色、能力边界、输出格式、可用库与风控
- domain:领域知识(函数白名单、对象/概念映射、坐标/规则、任务宏)
- 加载与调用
- 初始化一次加载 system+domain
- 运行期仅携带“状态摘要 JSON + 当前指令”
- 输出约束
- 仅输出代码块/结构化 JSON,参数承载语义
4.2 对象/概念映射(静态范式)
# 静态映射(示例)
OBJECTS = {
"turbine1": "UE_Turbine_A",
"turbine2": "UE_Turbine_B",
"solarpanels": "UE_Solar_Array",
"car": "UE_Car_A",
}
def resolve_position(env, name: str) -> list[float]:
"""根据通用名称解析环境内部对象并返回位姿[x,y,z]"""
query = OBJECTS[name] + ".*"
cand = []
while not cand:
cand = env.list_objects(query)
pose = env.get_pose(cand[0])
return [pose.x, pose.y, pose.z]
4.3 多模态与语音集成(视觉/ASR/TTS)
视觉:拍图 → VLM
这是最直接的多模态应用,将无人机摄像头捕获的图像交由视觉语言模型(VLM)进行理解,可以用于场景描述、目标清点等任务。
# 视觉:拍图→VLM
img = camera.capture() # bytes
b64 = base64.b64encode(img).decode()
resp = llm.chat.completions.create(
model="vision-model",
messages=[{"role":"user","content":[
{"type":"text","text":"列出清晰可见目标"},
{"type":"image_url","image_url":{"url":f"data:image/png;base64,{b64}"}}]}],
temperature=0.01
)
print(resp.choices[0].message.content) # 目标列表
视觉:深度相机定位
原理与实现
在 AirSim 中,我们无需模拟复杂的双目立体匹配,因为其渲染引擎能直接生成像素级的深度图,这极大地简化了定位过程。AirSim 提供两种主要的深度图类型:DepthPlanar 和 DepthPerspective。
DepthPlanar:图中每个像素的值代表该点到相机投影平面的垂直距离。DepthPerspective:图中每个像素的值代表该点到相机光心(即相机本身)的直线距离。
结合这两种深度图,我们可以精确计算出任何一个像素点相对于相机的三维坐标。具体流程是:
使用目标检测模型(如 GroundingDINO)在彩色图中找到目标的边界框(Bbox)。
取边界框的中心点
(cx, cy)作为目标在图像上的位置。从
DepthPlanar图中查询(cx, cy)处的深度值d_plane。从
DepthPerspective图中查询(cx, cy)处的深度值d_cam(这即是目标到相机的直线距离)。利用
d_plane和d_cam,通过三角关系计算出目标相对于相机中心线的偏航角。
# 视觉:单目深度估计 → 距离/角度
scene, depth_planar, depth_persp = sensor.capture_multi()
(xmin,ymin,xmax,ymax) = detect_bbox(scene)
cx, cy = (xmin+xmax)//2, (ymin+ymax)//2
d_plane = depth_planar[cy, cx]; d_cam = depth_persp[cy, cx]
angle = math.degrees(math.acos(max(1e-6, min(1.0, d_plane/max(1e-6, d_cam)))))
angle = -angle if cx < scene.shape[1]/2 else angle
result = {"name": "target", "distance": float(d_cam), "angle_deg": float(angle)}
双目定位原理
尽管 AirSim 提供了捷径,了解传统的双目定位原理依然重要,因为它在真实世界的机器人中广泛应用。其核心是模拟人类双眼,通过两个有固定间距(基线 Baseline)的相机拍摄同一场景。同一物体在左右图像中的水平像素位置差称为 视差 (Disparity)。物体越近,视差越大。根据相机 焦距 (Focal Length)、基线和测得的视差,利用公式 深度 = (焦距 * 基线) / 视差 即可计算深度。
# 视觉:双目定位(Stereo Localization)
# 假设双目相机参数已知(来自 settings.json 或标定)
FOCAL_LENGTH = 320 # 焦距(像素单位)
BASELINE = 0.25 # 基线,即双目相机间距(米)
# 1. 获取左右相机图像
responses = client.simGetImages([
airsim.ImageRequest("front_left", airsim.ImageType.Scene),
airsim.ImageRequest("front_right", airsim.ImageType.Scene)
])
img_left = cv2.imdecode(np.frombuffer(responses[0].image_data_uint8, np.uint8), 1)
img_right = cv2.imdecode(np.frombuffer(responses[1].image_data_uint8, np.uint8), 1)
# 2. 在左图检测目标,获得其中心点 (cx_left, cy)
(xmin, ymin, xmax, ymax) = detect_bbox(img_left)
cx_left, cy = (xmin + xmax) // 2, (ymin + ymax) // 2
# 3. 在右图中找到对应点 (cx_right, cy)(需立体匹配算法)
cx_right = find_corresponding_point(img_left, img_right, (cx_left, cy))
# 4. 计算视差和深度
disparity = cx_left - cx_right
if disparity > 0:
depth = (FOCAL_LENGTH * BASELINE) / disparity
# 5. 反算三维坐标 (相对于左相机)
X = (cx_left - img_left.shape[1] / 2) * depth / FOCAL_LENGTH
Y = (cy - img_left.shape[0] / 2) * depth / FOCAL_LENGTH
Z = depth
result = {"name": "target", "position_relative": [X, Y, Z]}
else:
result = None
5. 思考:知识库构建
5.1 总览
- 在缺少固定对象映射的真实环境中,可以“感知绑定—语义解析—世界状态内存”为主线贯通知识库与执行体系,确保在对象无先验ID、目标可移动、感知噪声与语义歧义下,仍能稳定、低成本地完成环境交互。
5.2 感知
- 目标与方法
- 检测/分割/多模态检索结合跟踪与 ReID,完成对象发现、连续追踪与在线绑定。
- 首次出现的实例分配临时 ID(如 car#1),持久化位姿、外观特征与别名。
- 端到端链路
- 视觉/多模态采集 → 检测(类别/框/特征)→ 跟踪 + ReID(跨帧一致)→ 实例库更新(ID/pose/feature)。
5.3 语义解析
- 目标与方法
- 将“离我最近/左边第二个/黄色箱子”等自然表述解析为空间与属性约束(距离、排序、颜色/形状/尺寸/OCR 等)。
- 基于实例库筛选候选目标,不唯一则返回缩略图或方位距离进行澄清。
- 端到端链路
- 自然语句 → 约束解析(空间/属性/数量)→ 候选检索与排序 → 歧义澄清(小图/方位距离)→ 最终实例。
5.4 世界模型、控制与优化
- 世界状态内存
- 轻量语义图维护 id、类别、别名、NED 位姿、2D 框、ReID、空间关系(near/left_of),随时间与可见性迭代更新与清理。
- 控制链路
- 最终实例位姿 → 动作 API(aw.*)→ 执行结果(位姿/成功态/异常)回写内存,形成“感知-控制”闭环。
- 工程化优化
- 知识外置与一次加载:固定规则/术语/动作 API 在初始化注入;请求仅携带状态摘要 JSON(pos/goal/step/alt/yaw)与当次指令。
- 输出结构化:仅代码或 JSON,低温度与 max_tokens 控制长度;函数调用优先,用参数承载语义。
- 复用与拆解:常见序列宏与缓存复用;长流程拆步执行;图片/日志采用缩略或哈希减少上下文。
- 治理与安全:版本化与一致性校验、异常路径与回退策略、权限与密钥安全(环境变量/脱敏日志)、可观测埋点闭环优化。
5.5 最小实现示例
# 感知与实例化
dets = detect("wind turbine, car, tower") # [{cls,bbox,feat,pose?}, ...]
tracks = tracker.update(dets) # [{cls,reid,pose}, ...]
# 在线绑定(首次见面分配实例ID)
for t in tracks:
if t.reid not in memory:
num = sum(v["cls"] == t.cls for v in memory.values()) + 1
memory[t.reid] = {"id": f"{t.cls}#{num}", "cls": t.cls, "pose": t.pose,
"aliases": [], "last_seen": now()}
# 指令解析为约束
cons = parse_constraints("左边第二个风机,上方3米") # {"cls":"wind_turbine","order":"left@2","offset":{"z":-3}}
# 实例选择或澄清
cand = select(memory, cons) # 结合方位/距离/外观筛选
if len(cand) != 1:
ask_user_disambiguation(preview(cand)) # 附缩略图/距离/方位
else:
p = cand[0]["pose"]
aw.fly_to([p.x, p.y, p.z - 3]) # NED:上方3m
5.6 世界状态内存示例
{
"id": "car#1",
"class": "car",
"name_aliases": ["汽车", "那辆红色车"],
"pose_ned": [12.0, -3.5, -1.2],
"bbox_2d": [100, 200, 240, 360],
"reid": "2f91...c8",
"last_seen": 1736390000,
"relations": {"near": ["tower#1"], "left_of": ["turbine#1"]}
}
6. 基于功能框架自动构建知识库
6.1 思路与范式
- 代码即知识(Code as Knowledge)
- 手工维护知识库与代码同步易出错且低效。核心范式是将功能代码本身作为唯一真实源(Single Source of Truth),知识库应从此自动生成。
- 自动化构建流程
- 装饰器标记:以 @tool 等装饰器标记需暴露给大模型的函数,作为自动化扫描的入口。
- 静态/动态解析:通过代码内省(Introspection)或静态分析,提取函数签名、Type Hint、结构化文档字符串(Docstrings)与对象映射字典。
- 模板化生成:将解析出的结构化信息填入预设的 Markdown 模板,生成最终的 SYSTEM_PROMPT 与 KNOWLEDGE_PROMPT。
6.2 自动化实现示例
- 第一步:规范化功能代码(
airsim_smol_wrapper.py的范式)
- 使用 @tool 装饰器、类型提示和结构化文档字符串。
# smolagents 的 @tool 或自定义装饰器
from smolagents import tool
from typing import Tuple
# 对象映射字典
objects_dict = {
"可乐": "airsim_coca",
"小鸭子": "airsim_duck",
}
@tool
def get_position(object_name: str) -> Tuple[float, float, float, float]:
"""
获取指定对象的位置与偏航角。
Args:
object_name (str): 需查询的对象名称(中文)。
Returns:
Tuple[float, float, float, float]: 包含三维坐标(x,y,z)与偏航角(角度制)的元组。
"""
# ... 实现代码 ...
query_string = objects_dict[object_name] + ".*"
# ...
return [pose.position.x_val, pose.position.y_val, pose.position.z_val, yaw_degree]
@tool
def fly_to(point: Tuple[float, float, float, float]) -> str:
"""
控制无人机飞至目标点。
Args:
point (Tuple[float, float, float, float]): 目标点,含三维坐标(x,y,z)与偏航角(角度制)。
Returns:
str: 成功状态描述,如 "成功"。
"""
# ... 实现代码,含 NED 坐标转换 ...
return "成功"
- 第二步:编写知识库生成脚本(
generate_kb.py)
- 使用 inspect 解析模块,docstring_parser 解析文档。
import inspect
import docstring_parser
import airsim_smol_wrapper as tools_module # 导入功能模块
def build_knowledge_base():
functions_info = []
# 遍历模块成员
for name, member in inspect.getmembers(tools_module):
# 检查是否为被 @tool 装饰的函数
if inspect.isfunction(member) and hasattr(member, '_is_tool'):
# 解析函数签名与文档
sig = inspect.signature(member)
docstring = docstring_parser.parse(member.__doc__)
# 提取信息
params = [f"{p.name}: {p.annotation}" for p in sig.parameters.values()]
func_info = {
"name": name,
"params_str": ", ".join(params),
"return_type": sig.return_annotation,
"description": docstring.short_description,
"args": [{"name": p.arg_name, "desc": p.description} for p in docstring.params]
}
functions_info.append(func_info)
# 读取对象映射
object_mapping = tools_module.objects_dict
# 使用模板生成 Markdown (此处用 f-string 简化)
kb_md = "## 可用函数\n\n"
for func in functions_info:
kb_md += f"- **{func['name']}**(`{func['params_str']}`) -> `{func['return_type']}`\n"
kb_md += f" - **描述**: {func['description']}\n"
for arg in func['args']:
kb_md += f" - **参数** `{arg['name']}`: {arg['desc']}\n"
kb_md += "\n## 对象映射(中文→内部名)\n\n"
for key, value in object_mapping.items():
kb_md += f"- `{key}` → `{value}`\n"
# 写入文件
with open("KNOWLEDGE_BASE.md", "w", encoding="utf-8") as f:
f.write(kb_md)
if __name__ == "__main__":
build_knowledge_base()
6.3 示例输出
## 可用函数
- **get_position**(`object_name: <class 'str'>`) -> `typing.Tuple[float, float, float, float]`
- **描述**: 获取指定对象的位置与偏航角。
- **参数** `object_name`: 需查询的对象名称(中文)。
- **fly_to**(`point: typing.Tuple[float, float, float, float]`) -> `<class 'str'>`
- **描述**: 控制无人机飞至目标点。
- **参数** `point`: 目标点,含三维坐标(x,y,z)与偏航角(角度制)。
## 对象映射(中文→内部名)
- `可乐` → `airsim_coca`
- `小鸭子` → `airsim_duck`
6.4 可能性
- 优势
- 一致性:知识库与代码实现永久同步,减少人工维护错误。
- 效率:新增功能只需按规范编写代码与文档,知识库自动更新。
- 可扩展性:轻松管理成百上千个工具,支撑复杂 Agent 框架。
- 展望
- CI/CD 集成:代码提交时自动运行生成脚本,确保知识库实时更新。
- 原生 Function Calling:自动生成符合 OpenAI/LangChain 等框架的 JSON Schema,提升调用效率与准确性。
- 代码自省:进一步分析函数体(如 NED 转换逻辑),自动在描述中添加“坐标系已处理”等隐性规则。
7. 模糊指令与代码智能体(Code agents)
7.1 从用户通用语言到精确代码
- 用户的视角:用户不了解底层代码,倾向于使用高层、模糊的自然语言下达指令。
- 模糊指令示例:“找到小鸭子”、“检查一下风力发电机有没有问题”、“飞到太阳能板那边看看”。
- 机器的视角:功能框架与知识库只接受精确、结构化的函数调用。
- 精确指令示例:aw.fly_to([10.5, -3.2, -5.0]),aw.detect("duck")。
- 核心矛盾:如何将用户的模糊意图,自动翻译并分解为一系列精确、有序的原子操作(函数调用)集合。
7.2 代码智能体的多步推理与规划
代码智能体 (Code Agent):一个以大模型为核心的系统,它能理解自然语言,查询知识库,选择并编排工具(函数),生成并执行代码来完成复杂任务。
核心流程:分解模糊命令为精确指令集
1. 意图与实体识别:解析用户指令,识别核心意图(如“查找”、“检查”、“移动”)和关键实体(“小鸭子”、“风力发电机”、“太阳能板”)。
2. 知识库查询与工具选择:基于识别出的意图和实体,在知识库中检索最匹配的可用函数/工具。
- “查找” → 匹配到 look(),detect(),ob_objects()
- “小鸭子” → 匹配到对象映射 小鸭子: airsim_duck
3. 任务分解与规划(宏组合):当单一工具无法完成任务时,Agent 需将模糊指令分解为一系列有序的、可执行的原子步骤。
- 这是将复杂命令分解为“宏组合”的关键,Agent 在此充当了任务规划师。
4. 代码生成与执行:将规划好的步骤序列,翻译成符合知识库规范的 Python 代码,并按需执行。
5. 结果观察与迭代:执行代码后,观察返回结果。如果任务未完成(如未找到目标),则基于新状态重新规划,形成闭环。
7.3 示例1:分解模糊指令(“找到小鸭子”)
用户指令:“找到小鸭子”
**Agent 的推理与规划
1. 意图/实体:意图=找到,实体=小鸭子。
2. 知识库查询:我知道 小鸭子 对应 duck。我有 detect(object_names) 工具可以检测目标,turn_left() 和 turn_right() 可以改变朝向。
3. 任务分解(宏组合)
- Plan A:原地旋转搜索
- (a) 以当前位置为中心,向左旋转 30 度。
- (b) 调用 detect("duck") 查看是否在视野内。
- (c) 如果检测到,记录其位置信息,任务成功。
- (d) 如果未检测到,重复 (a) 和 (b) 直到旋转一圈。
- (e) 如果一圈后仍未找到,报告“在当前位置未找到目标”。
4. 代码生成
# Agent 生成并执行的代码
duck_found = False
for _ in range(12): # 360/30 = 12 steps
aw.turn_left(30) # 假设 aw.turn_left() 已封装
time.sleep(1) # 等待姿态稳定
# 调用视觉检测工具
detected_objects, locations = aw.detect("duck")
if "duck" in detected_objects:
print(f"找到小鸭子,位置信息: {locations[0]}")
duck_found = True
break
if not duck_found:
print("在当前位置附近未找到小鸭子。")
7.4 示例2:分解复杂指令
用户指令:“飞过去检查一下第一个风力发电机”
Agent 的推理与规划
1. 意图/实体:意图=检查,实体=第一个风力发电机。
2. 知识库查询:第一个风力发电机 映射到 turbine1。检查 是个复杂动作,没有直接对应的工具。但我有 get_position() 和 fly_path()。我可以规划一个环绕飞行的路径来实现“检查”。
3. 任务分解(宏组合)
- (a) 调用 get_position("turbine1") 获取目标中心点 (cx, cy, cz)。
- (b) 定义一个环绕半径(如 15 米)和检查高度(如目标高度)。
- (c) 在目标点周围生成一个由多个航点组成的圆形或方形路径。
- (d) 调用 fly_to() 飞到第一个航点。
- (e) 调用 fly_path() 按顺序飞越所有航点,完成环绕检查。
- (f) (可选) 在飞行过程中,周期性调用 watch("详细描述叶片状态") 进行多模态观察。
4. 代码生成
# Agent 生成并执行的代码
import math
# Step a: 获取目标位置
target_pos = aw.get_position("turbine1")
cx, cy, cz = target_pos[0], target_pos[1], target_pos[2]
# Step b & c: 生成环绕路径
radius = 15.0
height = cz - 20 # 假设在目标上方20米检查
waypoints = []
for i in range(8): # 8个航点
angle = math.radians(i * 45) # 45度间隔
x = cx + radius * math.cos(angle)
y = cy + radius * math.sin(angle)
waypoints.append(airsim.Vector3r(x, y, height))
# Step d & e: 执行飞行
aw.fly_to(waypoints[0])
aw.fly_path(waypoints + [waypoints[0]]) # 飞一圈并回到起点
print("已完成对风力发电机1的环绕检查。")
7.5 代码智能体的价值
降低使用门槛:用户无需学习复杂的 API 或编程,用自然语言即可与系统交互。
提升任务上限:通过任务分解和宏组合,Agent 能完成远超单个工具能力的复杂、多步任务。
动态适应性:通过观察-规划-执行的闭环,Agent 能根据环境变化和执行结果调整策略,表现出更高的智能和鲁棒性。
框架支持:
smol-agents,LangChain,AutoGen等框架为此类智能体的构建提供了强大的工程支持,包括工具注册(如@tool),规划逻辑和执行循环。
8. 语音指令
8.1 必要性
自然与直观:语音是人类最自然的沟通方式,极大地降低了操作门槛,用户无需学习复杂的编程或遥控器操作。
解放双手(Hands-Free):在真实作业场景中,操作员可能需要同时处理其他事务或手持设备,语音指令实现了“解放双手”,提升了操作安全性与效率。
表达复杂意图:相比于按钮或摇杆,语言能更灵活地表达复杂、多步骤的任务意图,例如“先飞到那边的太阳能板,然后从左到右扫描一遍”,这背后蕴含了目标识别、路径规划和连续动作。
多模态协同:语音是多模态交互的核心。用户可以结合视觉说出“看看那个红色的车”,系统需要融合视觉定位与语音指令才能准确执行,实现更智能的交互。
8.3 实现原理与架构
语音指令的端到端实现,是一个整合了 语音处理,语言理解,任务规划 和 代码执行 的完整链路。本项目核心架构如下:
语音识别 (ASR - Audio Speech Recognition):将用户的原始语音流转换成文本字符串。
代码智能体 (LLM Agent):接收文本指令,作为系统的“大脑”。
知识库查询与任务规划:智能体查询已构建的知识库,理解文本指令的意图,并将其分解为一系列精确的、可执行的原子步骤(宏组合)。
代码生成:智能体将规划好的步骤序列,生成符合功能框架(如
aw.*)的Python代码。代码执行:执行生成的代码,通过已封装的
AirSimWrapper或smol-agent tools与无人机仿真环境交互。(可选)语音合成 (TTS - Text to Speech):将执行结果或需要澄清的问题,合成为语音,向用户播报,形成交互闭环。
graph TD
A[用户语音输入] -->|麦克风/UI| B(语音识别 ASR)
B -->|文本指令| C{代码智能体 LLM Agent}
C -- 查询 --> D[知识库(函数/对象/规则)]
D -- 返回可用工具 --> C
C -->|生成代码| E[Python 代码执行]
E -->|调用| F[功能框架 aw.*]
F -->|控制| G[AirSim 无人机]
G -- 状态反馈 --> F
F -- 结果 --> E
E -- 执行状态 --> C
C -->|生成回复文本| H(语音合成 TTS)
H -->|语音输出| I[用户]
8.4 案例
from fake.user_app.recognition_module import process_mp3
from fake.five.user_app.voice_module import process_text2mp3
from fake.four.agent_app.airsim_agent import AirSimAgent # 假设使用一个统一的Agent
# --- 初始化 ---
# 1. 初始化代码智能体,加载最全的知识库
# 该知识库应包含飞行控制、多模态视觉工具、对象映射等
print("正在初始化智能体...")
my_agent = AirSimAgent(knowledge_prompt="prompts/knowledge_base_full.txt")
# --- 模拟一次完整的语音交互 ---
# 2. 语音输入 (在真实应用中,这会来自麦克风录音)
# 这里我们使用一个预先录制好的音频文件
audio_file_url = "https://your-online-storage/fly_to_car_and_look.mp3"
print(f"接收到语音指令,正在识别...")
# 3. 语音识别 (ASR)
command_text = process_mp3(audio_file_url)
print(f"识别结果: '{command_text}'")
# 4. (可选) TTS 确认指令
feedback_text = f"收到指令: {command_text}。正在规划..."
process_text2mp3(feedback_text)
# play_audio("feedback.mp3") # 播放确认语音
# 5. 代码智能体处理指令
# Agent会进行任务分解和代码生成
print("智能体正在处理指令...")
# 设置为 True 以直接执行生成的代码
generated_code = my_agent.process(command_text, run_python_code=True)
print("\n--- 智能体生成的代码 ---")
print(generated_code)
print("------------------------\n")
# 6. (可选) TTS 报告任务结果
# 真实的 Agent 会根据代码执行的返回结果来生成报告
final_report_text = "任务已完成。已到达汽车上方并完成观察。"
process_text2mp3(final_report_text)
# play_audio("report.mp3") # 播放最终报告
print("语音指令流程结束。")
参考文档
AirSim 编译时 UnrealBuildTool 路径错误问题解决方案
1. 问题描述
在使用 Visual Studio 2022 编译 AirSim 1.8.1 时,执行编译脚本后出现以下错误:
- 编译过程卡在
Generating files for Blocks.uproject步骤 - 错误信息:
Unhandled Exception: System.IO.FileNotFoundException - 执行的命令为:
Running C:/Program Files/Epic Games/UE_4.27/Engine/Binaries/DotNET/UnrealBuildTool/UnrealBuildTool.exe -projectfiles -project="C:/Users/Administrator/Documents/Airsim/Unreal/Environments/Blocks/Blocks.uproject" -game -rocket -progress -log="C:\Users\Administrator\Documents\Airsim\Unreal\Environments\Blocks/Saved/Logs/UnrealVersionSelector-2025.12.17-10.32.37.log"
环境信息:
- AirSim 版本:1.8.1(下载地址)
- Unreal Engine 版本:4.27.2
- Visual Studio 版本:Visual Studio 2022 Developer Command Prompt v17.14.22
- 操作系统:Windows
2. 问题原因
错误发生的原因在于 GenerateProjectFiles.bat 脚本中使用了错误的 UnrealBuildTool.exe 路径。
- 错误路径:
C:/Program Files/Epic Games/UE_4.27/Engine/Binaries/DotNET/UnrealBuildTool/UnrealBuildTool.exe - 正确路径:
C:/Program Files/Epic Games/UE_4.27/Engine/Binaries/DotNET/UnrealBuildTool.exe
注意:正确的路径中,UnrealBuildTool.exe 直接位于 Binaries/DotNET/ 目录下,而不是在 Binaries/DotNET/UnrealBuildTool/ 子目录中。
3. 解决方案
3.1 定位脚本文件
找到 AirSim 项目中的 GenerateProjectFiles.bat 脚本文件,路径通常为:
C:\Users\Administrator\Documents\AirSim\Unreal\Environments\Blocks\GenerateProjectFiles.bat
3.2 修改脚本内容
打开 GenerateProjectFiles.bat 文件,将内容修改为:
setlocal
set UEVer=%1
if "%UEVer%"=="" set "UEVer=4.27"
set UnrealBuildTool=%PROGRAMFILES%\Epic Games\UE_%UEVer%\Engine\Binaries\DotNET\UnrealBuildTool.exe
for %%f in (*.uproject) do (
echo Generating files for %%f
"%UnrealBuildTool%" -projectfiles -project="%cd%\%%f" -game -rocket -progress
)
关键修改:将 UnrealBuildTool 变量设置为正确的路径:
set UnrealBuildTool=%PROGRAMFILES%\Epic Games\UE_%UEVer%\Engine\Binaries\DotNET\UnrealBuildTool.exe
注意:修复后的路径直接指向 Binaries/DotNET/UnrealBuildTool.exe,移除了多余的 UnrealBuildTool/ 子目录。
3.3 重新编译
修改脚本后,重新执行编译流程,问题应已解决。
参考文档
在 Linux 上使用 Epic Asset Manager 管理 UE 资源库
1. 安装 Flatpak 和 Flathub
如果系统尚未安装 Flathub,需要先进行安装:
1.1 安装 Flatpak
sudo apt install flatpak
sudo apt install gnome-software-plugin-flatpak
1.2 添加 Flathub 仓库
flatpak remote-add --if-not-exists flathub https://dl.flathub.org/repo/flathub.flatpakrepo
安装完成后,需要重启系统以使配置生效。
2. 安装 Epic Asset Manager
访问 Flathub 上的 Epic Asset Manager 页面 进行安装,或使用命令行安装。
安装完成后,可以通过以下命令启动:
flatpak run io.github.achetagames.epic_asset_manager
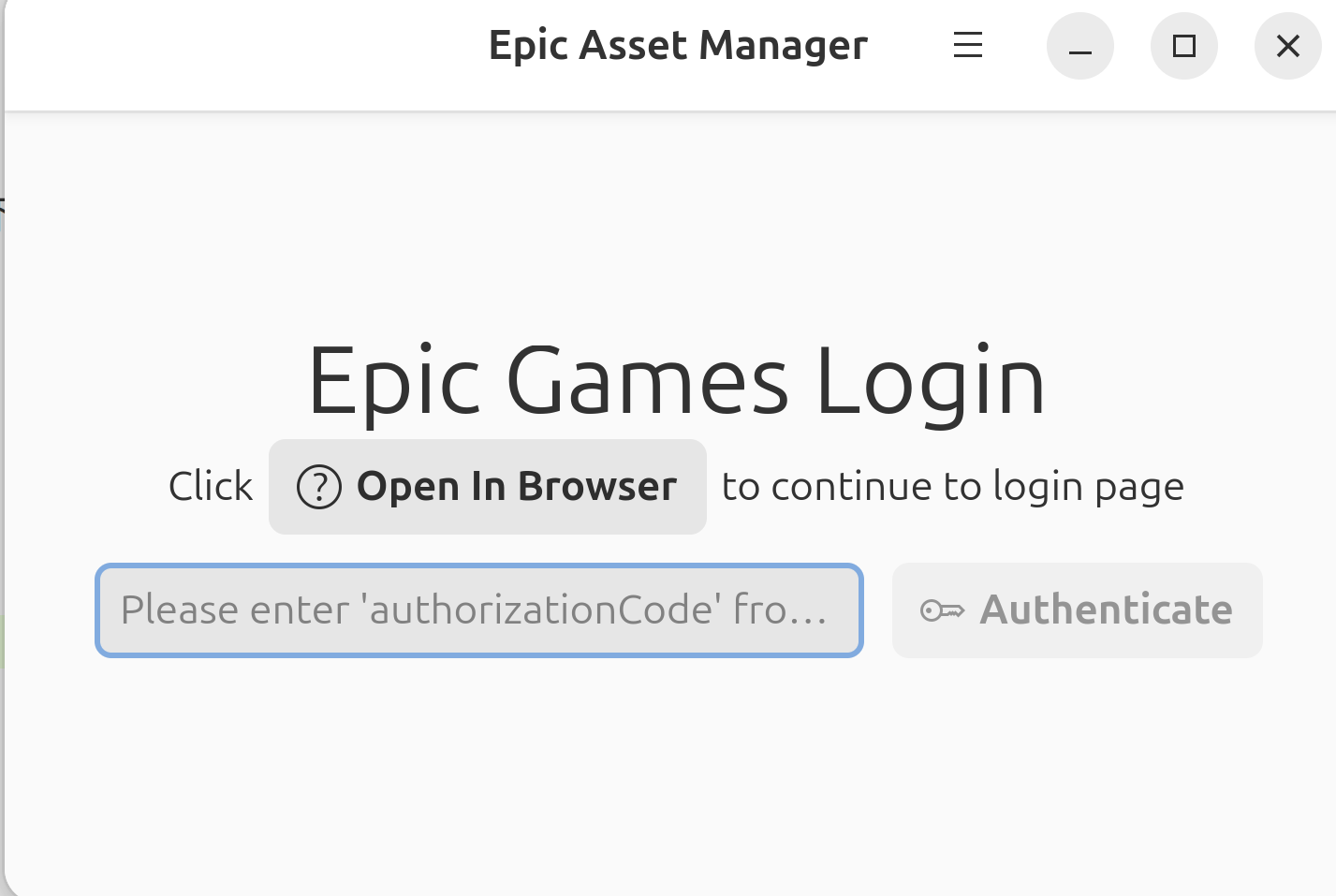
3. 登录和授权
3.1 浏览器授权
启动应用后,按照提示点击 Open In Browser 按钮。
3.2 复制授权码
在浏览器中完成 Epic Games 账号登录后,会显示授权码。
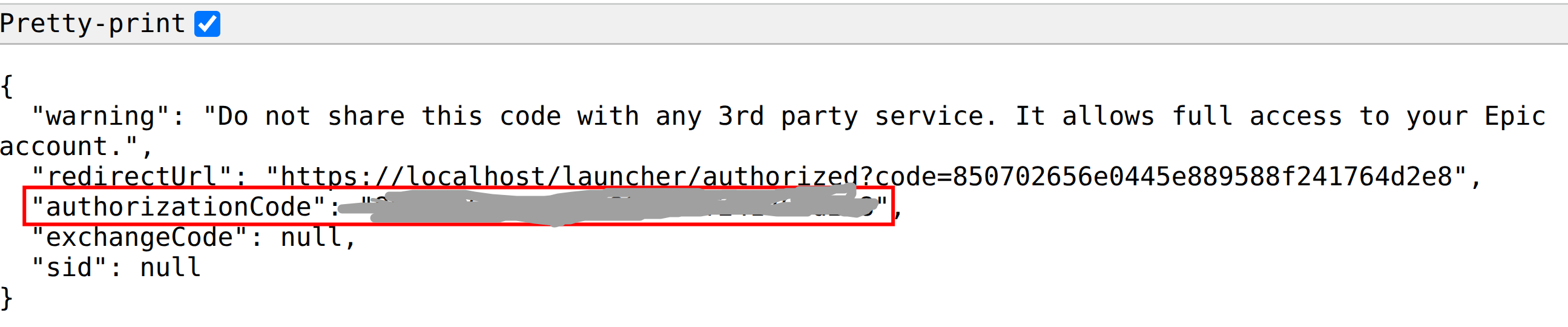
复制授权码字段,粘贴到应用中的授权框内完成授权。
4. 浏览和下载资产
授权成功后,可以在资产库中浏览 Unreal Engine 的资产。
选择需要的资产后,可以下载到本地。
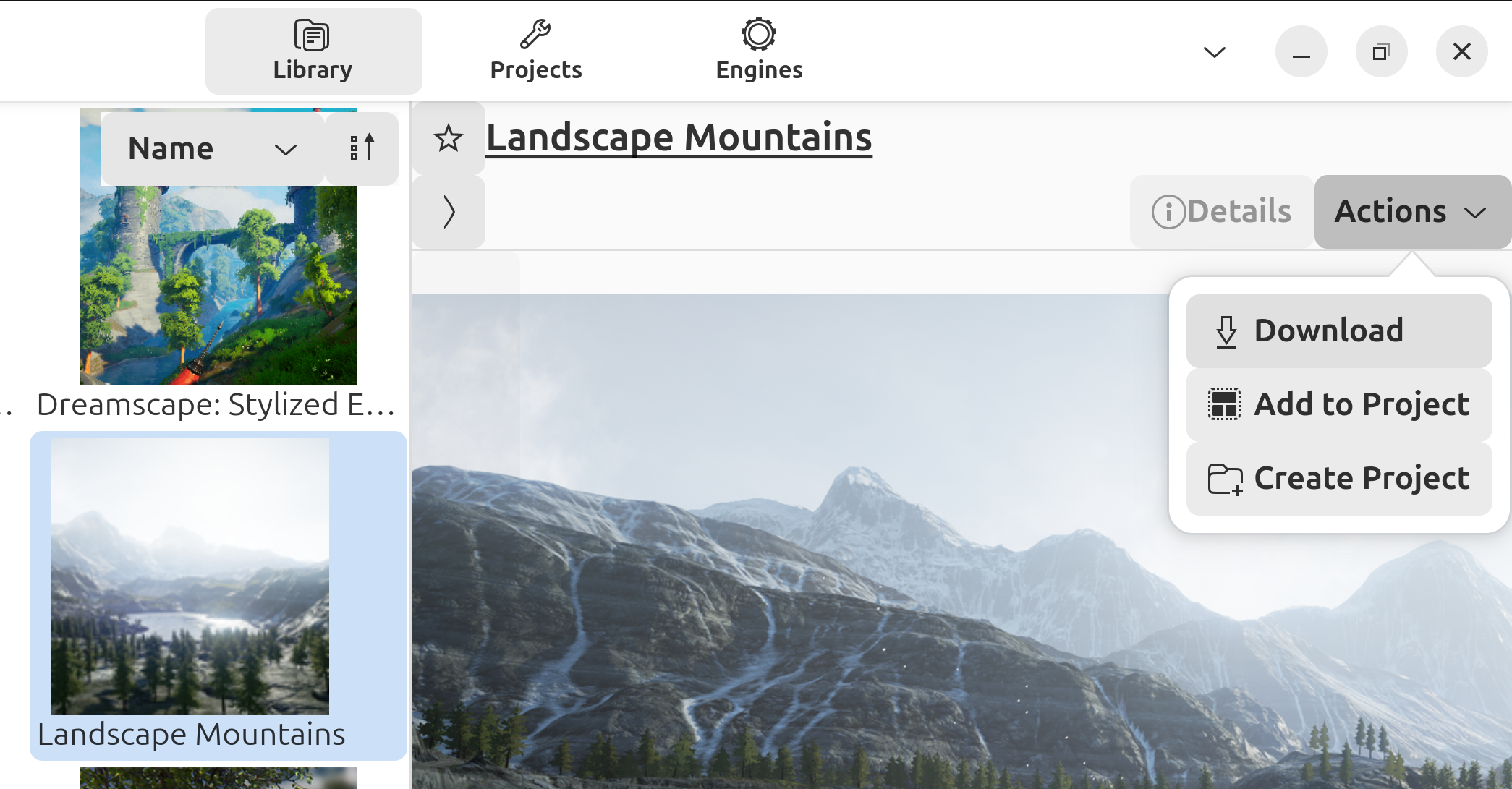
5. 创建和管理项目
5.1 创建项目
点击 创建项目 按钮,可以根据当前场景创建新项目。
5.2 项目操作选项
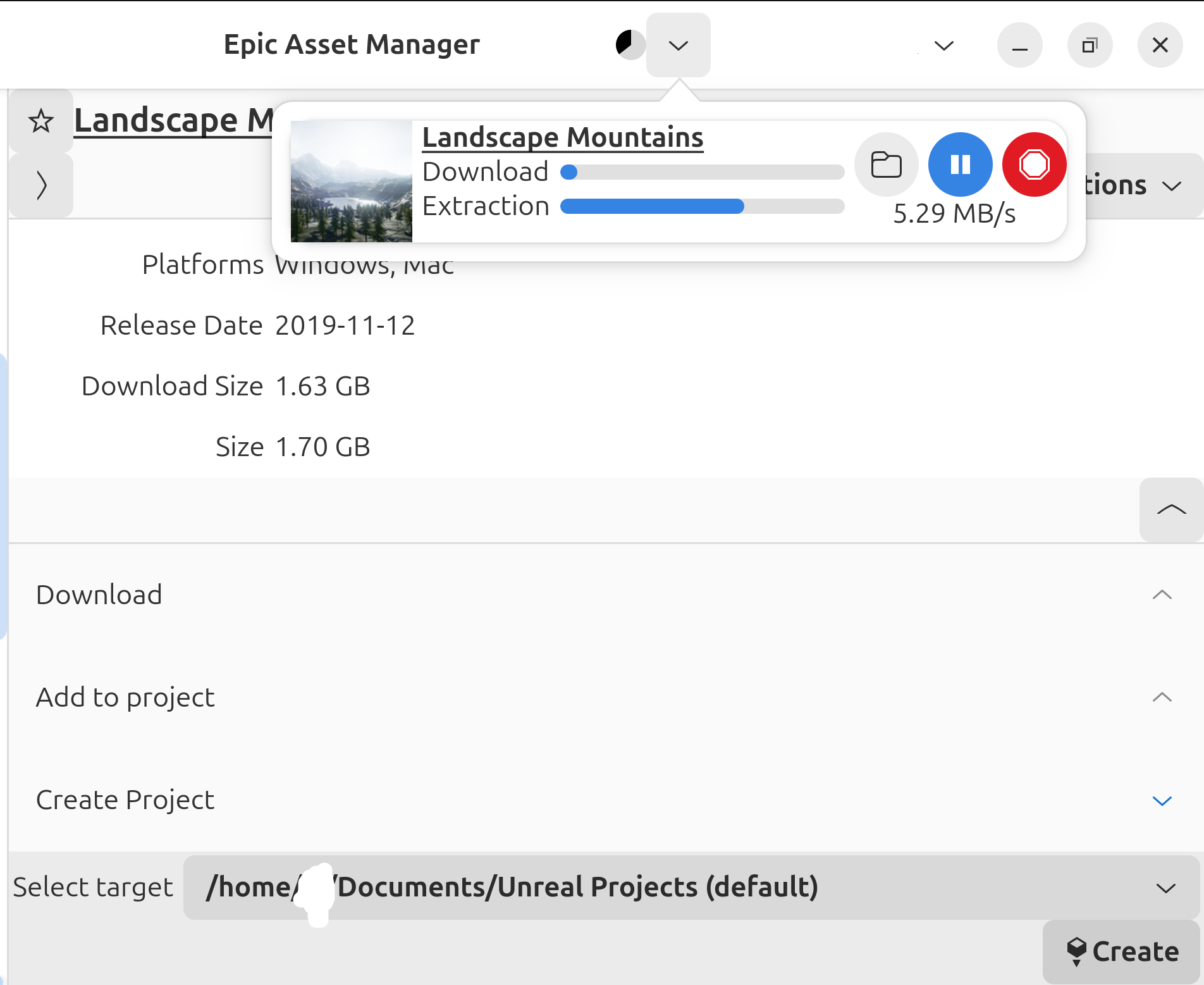
在项目界面中,可以看到以下操作选项:
- 下载资产
- 添加到现有项目
- 创建新项目
在顶部可以看到下载进度。
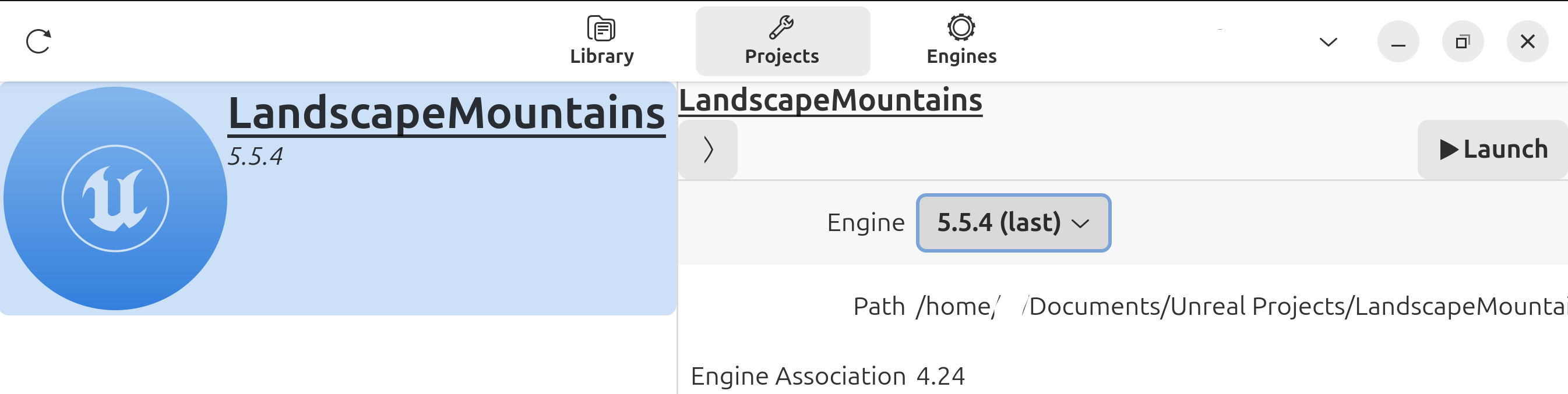
6. 启动项目
在顶部的 Project 分页中,选择已下载的场景,在右侧选择合适的 Unreal Engine 版本,点击 Launch 按钮启动项目。